Bezpečnostní informační portál. Použití Kalmanova filtru k filtrování hodnot ze senzorů Kalmanův filtr pro nelineární systémy
Přepis
1 # 09, září 2015 MDT Aplikace Kalmanova filtru pro zpracování sekvence GPS souřadnic Listerenko R.R., bakalář Rusko, Moskva, MSTU. N.E. Bauman, katedra počítačového softwaru a informační technologie» Vědecký vedoucí: Bekasov D.E., asistent Rusko, Moskva, MSTU pojmenované po. N.E. Bauman, Katedra počítačového softwaru a informačních technologií Úloha filtrování GPS souřadnic V současné době jsou hojně využívány sledovací služby GPS, jejichž úkolem je sledovat trasy pozorovaných objektů za účelem jejich uložení a další reprodukce a analýzy. Kvůli chybě snímače GPS z mnoha důvodů, jako je ztráta signálu ze satelitu, změny geometrie satelitu, odraz signálu, chyby ve výpočtu a chyby zaokrouhlování, však konečný výsledek přesně neodpovídá trase objektu. Existují jak drobné odchylky (do 100 m), které nebrání vnímání vizuální informace o trase a její analýze, tak velmi významné (až 1 km, v případě ztráty satelitního signálu a použití základnové stanice až několik desítek km). Pro demonstraci výsledku algoritmu uvedeného v článku je použita trasa obsahující odchylky od skutečné polohy přesahující několik kilometrů. Aby se takové chyby napravily, vyvíjí se algoritmus, který transformuje posloupnost souřadnic. Vstupními daty pro algoritmus je sekvence GPS souřadnic. Každá souřadnice obsahuje následující informace přijaté ze senzoru: Zeměpisná šířka Délka Azimut ve stupních Okamžitá rychlost objektu v daném bodě v m/s
2 Možná odchylka souřadnic objektu od skutečné hodnoty v metrech Čas pro přijetí souřadnice senzorem Výsledkem algoritmu je sekvence souřadnic s opravenou zeměpisnou šířkou a délkou. Bylo rozhodnuto použít Kalmanův filtr jako základ pro konstrukci algoritmu, protože nám umožňuje samostatně vzít v úvahu chyby měření a náhodné chyby procesu a také použít rychlost pohybu objektu získanou ze senzoru. Konstrukce matematický model použití Kalmanova filtru Pro použití Kalmanova filtru je nutné, aby byl studovaný proces popsán následovně: = + + (1) = + (2) Ve vzorci (1) - stavový vektor procesu, A - matice dimenze n n, popisující přechod pozorovaného procesu ze stavu v podmínce. Vektor popisuje řídící vlivy na proces. Matice B dimenze n l mapuje vektor řídících akcí u do změny stavu s. je náhodná proměnná popisující chyby studovaného procesu a ~0, kde Q je kovarianční matice chyb procesu. Vzorec (2) popisuje měření náhodného procesu. - vektor měřeného stavu procesu, matice H s dimenzí m n mapuje stav procesu do dimenze procesu. - náhodná proměnná charakterizující chyby měření a ~0, kde P je kovarianční matice chyb měření. Protože je studován proces pohybu objektu, stavová rovnice je sestavena na základě pohybové rovnice tělesa = + +!" #$ % & ". Navíc neexistuje dodatečné informace o pohybovém procesu, proto se má za to, že řídící akce je rovna 0. Jako stav procesu se bere vektor = + () *, -. +, kde x, y jsou souřadnice objektu a projekce rychlosti objektu. Pro uvažovaný proces má tedy rovnice (1) následující tvar: = + /!, (3) Vědecký a technický bulletin mládeže FS, ISSN
3 kde = ! = 3! + 7 " 0 ; 6 2: 6 " / = : 6 0: 6 2: 6 0: , (4)!,4, (5) (6) V tomto modelu je zrychlení objektu považováno za náhodné chyba procesu. Jsou učiněny následující předpoklady: a) Zrychlení podél různých os jsou nezávislé náhodné veličiny.),* b)
4 = AB = C. C E. = C/!!. /. =/C!!. /. Protože složky vektoru ak (5) jsou nezávislé náhodné veličiny, pak C!!. = " 0 " G. Vzorec (7) má tedy následující tvar: = / " (8) Vektor měření zk pro tento problém je reprezentován následovně: H I = 0 + J, J (7) 2, (9) kde H, I jsou souřadnice objektu přijatého ze senzoru, J +, J, je rychlost objektu přijatého ze senzoru. Matice H ve vzorci (2) je rovna matici identity rozměru 4 4, protože v rámci tohoto problému se předpokládá, že měření je lineární kombinací stavového vektoru a za danou je považována kovarianční matice chyby měření. možné možnosti jeho výpočty jsou využitím dat o očekávané přesnosti měření získaných ze senzoru. Aplikace Kalmanova filtru na sestrojený model Pro aplikaci filtru je nutné zavést následující pojmy: - aposteriorní odhad stavu objektu v okamžiku k, získaný z výsledků pozorování do momentu k včetně. L je nekorigovaný zadní odhad stavu objektu v čase k. - posteriorní kovarianční matice chyb, která specifikuje odhad přesnosti získaného odhadu stavového vektoru a zahrnuje odhad chybových rozptylů vypočteného stavu a kovariancí, zobrazující zjištěné vztahy mezi parametry stavu systému. L je neupravená matice zadních kovariančních chyb. Matice P0 je nastavena na nulu, protože se předpokládá, že je známa počáteční poloha objektu. Mládežnický vědecký a technický zpravodaj FS, ISSN
5 Jedna iterace Kalmanova filtru se skládá ze dvou fází: extrapolace a korekce. a) Ve fázi extrapolace se odhad L vypočítá z odhadu stavového vektoru L a kovarianční matice chyb L podle následujících vzorců: L =, (10) L =. +, (11) kde matici Ak známe ze vzorce (4), matici Qk vypočítáme pomocí vzorce (8). b) Ve fázi korekce se matice faktorů zisku Kk vypočítá pomocí následujícího vzorce: M = L. L. + (12) kde R, H jsou považovány za známé. Kk se používá ke korekci odhadu stavu objektu L a chybové kovarianční matice L následovně: = L + M L, (13) = N M L, (14) kde I je matice identity. Je třeba poznamenat, že pro použití výše uvedených vztahů je nutné, aby jednotky měření byly konzistentní pro parametry objektu zahrnuté ve výpočtech. Ve zdrojových datech jsou však zeměpisná šířka a délka uvedeny v úhlových souřadnicích a rychlost v metrických souřadnicích. Navíc je také pohodlnější specifikovat zrychlení pro výpočet procesní chyby v metrických jednotkách. Vincentiho vzorce se používají k převodu rychlosti a zrychlení na úhlové jednotky. Výsledek filtru Na Obr. 1 ukazuje příklad cesty před zpracováním. Všimnete si, že v tomto příkladu je několik souřadnic s vysoký stupeň chyby, což je vyjádřeno přítomností „vrcholů“ souřadnic výrazně odstraněných z hlavní trasy. Na Obr. Obrázek 2 ukazuje výsledek filtru pracujícího s touto cestou.

6 Obr. 1. Trasa objektu Obr. 2. Trasa objektu po použití filtru V důsledku toho nejsou prakticky žádné „vrcholy“, s výjimkou největšího, který byl znatelně zmenšen a zbytek trasy byl vyhlazen. Pomocí výše uvedeného algoritmu bylo tedy možné snížit míru zkreslení trasy a zvýšit její vizuální kvalitu. Závěr Tato práce zkoumala přístup ke korekci GPS souřadnic pomocí Kalmanova filtru. Pomocí výše uvedeného algoritmu bylo možné eliminovat nejnápadnější deformace trasy, což demonstruje použitelnost tato metoda k problému vyhlazení trasy a odstranění špiček. Pro další zkvalitnění algoritmu je však nutné dodatečné zpracování posloupnosti souřadnic pro účely Vědeckotechnického bulletinu mládeže FS, ISSN.
7 odstranění nadbytečných bodů, které vznikají, když nedochází k žádnému pohybu pozorovaného objektu. Literatura 1. Yadav J., Giri R., Meena L. Error handling in GPS data processing // Mausam Vol. 62.č. 1. P Kalman R. E. A New Approach to Linear Filtering and Prediction Problems // Transactions of the ASME Journal of Basic Engineering Vol. 82.č. Řada D. P. P. Welch G., Bishop G. Úvod do Kalmanova filtru: Tech. Rep. TR Dostupné na: přístupno Vincenty T. Přímá a inverzní řešení geodetiky na elipsoidu s aplikací vnořených rovnic // Survey Review apr. Sv. 23. Bez PP
UDC 519.711.2 Algoritmus pro odhad parametrů orientace kosmické lodi pomocí Kalmanova filtru D. I. Galkin 1 1 MSTU im. N.E. Bauman, Moskva, 155, Rusko Je uveden popis konstrukce filtru Kalman
FEDERÁLNÍ AGENTURA PRO TECHNICKOU REGULACI A METROLOGII NÁRODNÍ STANDARD Ruská Federace GOST R 53608-2009 Globální navigace satelitní systém ZPŮSOBY A TECHNOLOGIE REALIZACE
PROGNÓZA BAYESIÁNSKÉ ČASOVÉ ŘADY NA ZÁKLADĚ STÁTNÍCH VESMÍRNÝCH MODELŮ V I Lobach Belorussky Státní univerzita Minsk Bělorusko E-mail: lobach@bsub Zvažuje se metoda předpovědi
UDC 681.5(07) IDENTIFIKACE NELINEÁRNÍCH DYNAMICKÝCH OBJEKTŮ V ČASOVÉ DOMÉNĚ D.N. Vjatčennikov, V.V. Kosobutsky, A.A. Nosenko, N.V. Plotnikova Nedostatečné informace o objektech během jejich vývoje
Ser. 0. 200. Vydání. 4 ZPRAVODAJ KONTROLNÍCH PROCESŮ UNIVERZITY Petrohrad MDT 539,3 V. V. Karelin TESTOVACÍ FUNKCE V PROBLÉMU ŘÍZENÍ PROCESU POZOROVÁNÍ. Úvod. Článek je věnován problému
UDC 63.1/.7 ALGORITHMY PRO ZPRACOVÁNÍ SEKUNDÁRNÍCH INFORMACÍ V RADAROVÉ STANICE S RŮZNÝMI TYPY DYNAMICKÉ KONVERZAČNÍ MATICE PŘI URČOVÁNÍ SOUŘADNICE VÝŠKOVÉHO ÚHLU Yanitskiy A.A. vědecký poradce
UDC 5979 + 5933 G A Omarova 630090, Rusko E-mail: gulzira@ravccru hnutí
Úvod do robotiky Přednáška 12. Část 2. Navigace a mapování. SLAM SLAM Simultaneous Localization And Mapping (simultánní lokalizace a mapování) Úloha SLAM je jednou z
Poznámky k přednášce „Lineární dynamické systémy. Kalmanův filtr." pro speciální kurz „Strukturální metody analýzy obrazu a signálů“ 211 Výukový program: některé vlastnosti normálního rozdělení. Nechť je rozděleno x R d
Lokalizační systém robota založený na hemisférické kameře Alexander Ovchinnikov, Hoa Phan Katedra radioelektroniky Tula State University, Tula, Rusko [e-mail chráněný], [e-mail chráněný]
Proceedings of MAI Issue 84 UDC 57:5198 wwwmairu/science/trudy/ Určení chyb bezgimbalového inerciálního navigačního systému v režimech pojíždění a zrychlení Vavilova NB* Golovan AA Kalchenko AO** Moskva
# 08, srpen 2016 UDC 004.93 "1 Normalizace dat 3D kamer pomocí metody hlavních komponentů k vyřešení problému rozpoznávání pozic a chování uživatelů chytré domácnosti Malykh D.A., student Rusko,
Národní technická univerzita Ukrajiny "Kyjevský polytechnický institut" Katedra přístrojů a orientačních a navigačních systémů Směrnice za laboratorní práce v oboru „Navigace
UDC 629.78.018:621.397.13 METODA PÁROVÝCH VZDÁLENOSTÍ V PROBLÉMU LETOVÉHO SEŘÍZENÍ ASTRO SNÍMAČŮ SYSTÉMU VESMÍRNÝCH AUTOMOBILŮ B.M. Sukhovilov Jak se přesnost a spolehlivost astronomických dat zlepšuje,
UDC 629.05 Řešení navigačního problému pomocí inerciálního navigačního systému strapdown a leteckého signálního systému Mkrtchyan V.I., student, katedra „Přístroje a systémy pro orientaci, stabilizaci a navigaci“
MODEL VIZUÁLNÍHO SYSTÉMU LIDSKÉHO OPERÁTORA V ROZPOZNÁVÁNÍ OBRAZU OBJEKTU Yu.S. Gulina, V.Ya. Moskevská státní technická univerzita Koljuchkin pojmenovaná po. N.E. Bauman, vysvětluje matematické
RAKETOVÉ A KOSMICKÉ INŽENÝRSTVÍ A INFORMAČNÍ SYSTÉMY 2015, ročník 2, číslo 3, str. 79 83 UDC 681.3.06 SYSTÉMOVÁ ANALÝZA, ŘÍZENÍ KOSMICKÝCH VOZIDEL, ZPRACOVÁNÍ INFORMACÍ A SYSTÉMY TELEKOMUNIKACE
Lineární dynamické systémy. Kalmanův filtr. Vzdělávací program: některé vlastnosti normálního rozdělení Hustota rozdělení.4.3.. -4 x b.5 x b =.7 5 p(x a x b =.7) - x p(x a,x b) p(x a) 4 3 - - -3 x.5
UDC 621.396.671 O. S. Litvinov, A. A. Gilyazova POSOUZENÍ POMOCÍ METODY VLASTNÍCH DIAGRAMŮ VLIVU RUŠIVÝCH SKUPIN NA PŘÍJEM UŽITEČNÉHO SIGNÁLU LINEÁRNÍ EKIDISTANTNÍ ADAPTIVNÍ ANTÉNOU
MDT 681.5.15.44 PRONOZA KUSOVÝCH STACIONÁRNÍCH PROCESŮ E.Yu. Alekseeva Jsou uvažovány diskrétní náhodné procesy obsahující parametry měnící se náhle v náhodných časech. Pro
UDC 63966 LINEÁRNÍ OPTIMÁLNÍ FILTROVÁNÍ PRO NEBÍLÝ ŠUM G F Savinov V této práci je získán optimální algoritmus filtru pro případ, kdy jsou vstupní vlivy a šumy náhodné Gaussovy
Stanovení oscilačních pohybů netuhých družicových prvků pomocí zpracování video obrazu D.O. Lazarev Moscow Institute of Physics and Technology Vědecký školitel, Ph.D.: D.S. Ivanov, Ústav
UDC 004 O METODÁCH SLEDOVÁNÍ A SLEDOVÁNÍ OBJEKTU NA VIDEOSTRUMU V APLIKACI NA VIDEO ANALYTICKÝ SYSTÉM PRO SBĚR A ANALÝZU MARKETINGOVÝCH DAT Chezganov D.A., Serikov O.N. Jižní ruský stát
Elektronický časopis "Proceedings of MAI". Vydání 66 www.ma.u/scence/tud/ UDC 69.78 Upravený navigační algoritmus pro určování polohy umělé družice pomocí signálů GS/GLONASS Kurshin A. V. Moscow Aviation
UDC 621.396.96 Studie algoritmu pro stanovení a potvrzení trajektorií podle kritéria M od N Chernova T.S., studentka katedry „Radio-elektronické systémy a zařízení“, Rusko, 105005, Moskva, MSTU. N.E.
TEORIE A PRAXE NAVIGAČNÍCH ZAŘÍZENÍ A SYSTÉMŮ UDC 531.383 VLIV CHYBY OTOČENÍ STOJANU NA PŘESNOST KALIBRACE BLOKŮ gyroskopů a akcelerometrů Avrutov V. V., Mazepa T. Yu National Technical
Přednáška 6 Charakteristika portfolií V předchozích přednáškách byl opakovaně používán termín „portfolio“ Pro matematickou formulaci problému výběru optimálního portfolia je nutné jeho striktní vymezení
IDENTIFIKACE ČASOVÉ ŘADY S MEZERAMI NA ZÁKLADĚ STÁTNÍCH PROSTOROVÝCH MODELŮ R. I. Merkulov V. I. Lobach Běloruská státní univerzita Minsk Bělorusko e-mail: [e-mail chráněný] [e-mail chráněný]
ZAŘÍZENÍ A SYSTÉMY AUTOMATICKÉHO ŘÍZENÍ UDC 51971 V N ARSENYEV, AG KOKHANOVSKIJ, AS FADEJEV MATEMATICKÝ MODEL SPOJENÍ IZOCHRONNÍCH VARIANT STAVOVÝCH PROMĚNNÝCH SYSTÉMU ŘÍZENÍ S PORUCHY PARAMETRŮ
Sborník MAI. Vydání 89 UDC 629.051 www.mai.ru/science/trudy/ Kalibrace páskového inerciálního navigačního systému při otáčení kolem svislé osy Matasov A.I.*, Tikhomirov V.V.** Moskovsky
Analytická geometrie Modul 1 Maticová algebra Vektorová algebra Text 4 (samostatná studie) Abstrakt Lineární závislost vektorů Kritéria pro lineární závislost dvou, tří a čtyř vektorů
MDT 62 396,26 L.A. Podkolzina, K.. Drugov ALGORITY ZPRACOVÁNÍ INFORMACÍ V NAVIGAČNÍCH SYSTÉMECH POZEMNÍCH PŘEDMĚTŮ PRO KANÁL URČOVÁNÍ SOUŘADNIC POLOHY Stanovení souřadnic a parametrů
STATISTICKÁ ANALÝZA PARAMETRICKÝCH ČASOVÝCH ŘAD S MEZERKAMI NA ZÁKLADĚ MODELŮ STÁTNÍHO PROSTORU S. V. Lobach Běloruská státní univerzita Minsk, Bělorusko e-mail: [e-mail chráněný]
Matematické metody pro zpracování dat MDT 6.39 S. Ya Zhuk.. Kozheshkurt.. Yuzefovič National Technical University of Ukraine „KP“ ave. Pobeda 37 356 Kyjev Ukrajina Institut problémů s registrací informací NAS
Konstrukce statiky MM technologických objektů Při studiu statiky technologických objektů se nejčastěji setkáváme s objekty s následujícími typy konstrukčních schémat (obr: O s jedním zadáním x a jedním
Odhad parametrů orientace kosmické lodi pomocí Kalmanova filtru Student, Katedra systémů automatické ovládání": D.I. Galkin Vědecký vedoucí: A.A. Karpunin, Ph.D., docent
5. Meleshko V.V. Strapdown inerciální navigační systémy: Učebnice. příspěvek / V.V. Meleshko, O.I. Nesterenko. Kirovograd: POLYMED-Service, 211. 172 s. Obdrženo před redaktorem 17. čtvrtletí 212 roku ÓKostyuk
UDC 004.896 Aplikace geometrických transformací pro anamorfizaci obrázků Kanev A.I., specialista Rusko, 105005, Moskva, MSTU. N.E. Bauman, Ústav zpracování informací a systémů řízení
4. Metody Monte Carlo 1 4. Metody Monte Carlo Pro simulaci různých fyzikálních, ekonomických a jiných efektů se široce používají metody zvané Monte Carlo. Vděčí za své jméno
Pásmová propust 1 Pásmová propust V předchozích částech bylo diskutováno filtrování rychlých variací signálu (vyhlazování) a jeho pomalých variací (detrending). Někdy je potřeba zvýraznit
[POZNÁMKY] Vysvětlení základů Kalmanova filtru pomocí jednoduché a intuitivní derivace Článek Ramseyho Farahera poskytuje jednoduché a intuitivní odvození Kalmanova filtru pro účely výuky
UDC 004.932 Algoritmus klasifikace otisků prstů Lomov D.S., student Rusko, 105005, Moskva, MSTU. N.E. Bauman, Katedra počítačového softwaru a informačních technologií Vedoucí práce:
Přednáška NUMERICKÉ CHARAKTERISTIKY SYSTÉMU DVOU NÁHODNÝCH PROMĚNNÝCH -ROZMĚRNÝ NÁHODNÝ VEKTOR ÚČEL PŘEDNÁŠKY: určit numerické charakteristiky systému dvou náhodných veličin: kovariance počátečního a centrálního momentu
Dynamika plodnosti v Čuvašské republice Obsah Úvod 1. Obecný trend porodnost Čuvašská republika 2. Hlavní trend v porodnosti 3. Dynamika porodnosti v městských a venkovských oblastech
IN 1990-5548 Elektronika a řídicí systémy. 2011. 4(30) 73 UDC656.7.052.002.5:681.32(045) V. M. Sineglazov, doktor inženýrství. Sciences, Prof., Sh. I. Askerov OPTIMÁLNÍ KOMPLEXNÍ ZPRACOVÁNÍ DAT V NAVIGACI
UDC 004.896 Vlastnosti implementace algoritmu pro zobrazování anamorfních výsledků Kanev A.I., specialista Rusko, 105005, Moskva, MSTU. N.E. Bauman, Katedra systémů zpracování informací a
177 UDC 658.310.8: 519.876.2 VYUŽITÍ PŘESNOSTI ODHADU PŘI REZERVACI SNÍMAČŮ L.I. Luzina Článek pojednává o možném přístupu k získání nového schématu redundance senzorů. Tradiční
SBÍRKA VĚDECKÝCH PRACÍ NSTU. 28,4 (54). 37 44 MDT 59.24 O KOMPLEX PROGRAMŮ PRO ŘEŠENÍ PROBLÉMU IDENTIFIKACE LINEÁRNÍCH DYNAMICKÝCH DISKRÉTNÍCH STACIONÁRNÍCH OBJEKTŮ G.V. TROSHINA Byl zvažován soubor programů
MDT 625.1:519.222:528.4 S.I. Dolganyuk S.I. Dolganyuk, 2010 ZVÝŠENÍ PŘESNOSTI NAVIGAČNÍHO ŘEŠENÍ PŘI UMÍSTĚNÍ POSUNOVACÍCH LOKOMOTIV POMOCÍ DIGITÁLNÍCH MODELŮ VÝVOJE TRATĚ
UDC 531.1 ADAPTACE FILTRU KALMAN PRO POUŽITÍ S MÍSTNÍMI A GLOBÁLNÍMI NAVIGAČNÍMI SYSTÉMY A.N. [e-mail chráněný]) V.E. [e-mail chráněný]) Ústav aplikované matematiky pojmenovaný po.
AUTOMATIZACE A ŘÍZENÍ MDT 68.58.3 A. G. Shpektorov, V. T. Fam St. Petersburg State Electrotechnical University "LETI" pojmenovaná po. V. I. Ulyanova (Lenina) Analýza využití mikromechan
ZÁKLADY REGRESNÍ ANALÝZY KONCEPCE KORELACE A REGRESNÍ ANALÝZY K řešení problémů ekonomické analýzy a prognózování se často používají statistická, reportovací nebo pozorovaná data
Přednáška 4. Řešení soustav lineárních rovnic metodou jednoduchých iterací. Pokud má systém velký rozměr (6 rovnic) nebo je matice systému řídká, jsou pro řešení efektivnější nepřímé iterační metody
58 Vědecká konference MIPT Sekce dynamiky a řízení pohybu kosmické lodi Systém pro určování pohybu modelů řídicích systémů na aerodynamickém stole pomocí videokamery
Přednáška 3 5. METODY APROXIMACE FUNKCÍ PROHLÁŠENÍ ÚLOHY Uvažujeme mřížkové tabulkové funkce [ a b] y 5. definované v uzlech mřížky Ω. Každá mřížka je charakterizována kroky h nerovnoměrnými nebo h
1. Numerické metodyřešení rovnic 1. Soustavy lineárních rovnic. 1.1. Přímé metody. 1.2. Iterační metody. 2. Nelineární rovnice. 2.1. Rovnice s jednou neznámou. 2.2. Soustavy rovnic. 1.
UDC 621.396 VÝZKUM ALGORITHMŮ PRO SEKUNDÁRNÍ ZPRACOVÁNÍ INFORMACÍ VÍCEPOLOHOVÉHO RADAROVÉHO SYSTÉMU PRO KANÁL ELIZOVANÉHO ÚHLU Borisov A.N., Glinchenko V.A., Nazarov A.A., Islamov R.V., Suchkov P.V. Vědecký
Téma Numerické metody lineární algebry - - Téma Numerické metody lineární algebry Klasifikace Lineární algebra má čtyři hlavní sekce: Řešení soustav lineárních algebraických rovnic (SLAE)
MDT 004.352.242 Obnova rozmazaných snímků řešením integrální rovnice konvoluce typu Ivannikova I.A., student Rusko, 105005, Moskva, MSTU. N.E. Bauman, katedra automatizace
AEROGRAVIMETRICKÉ MĚŘENÍ SE STANDARDNÍM PROVOZNÍM REŽIMEM GPS Mogilevsky V.E. Státní výzkumný a produkční podnik JSC Aerogeofizika Nejdůležitějším prvkem určujícím úspěšnost leteckého geofyzikálního výzkumu je kvalitní navigace
ANALÝZA AKUSTICKÝCH SIGNÁLŮ NA ZÁKLADĚ KALMANOVY FILTRAČNÍ METODY I.P. Gurov, P.G. Žiganov, A.M. Ozersky Vlastnosti dynamického zpracování stochastických signálů pomocí diskrétních
UDC AA Minko IDENTIFIKACE LINEÁRNÍHO OBJEKTU REAKCÍ NA HARMONICKÝ SIGNÁL Je navržen zobecněný identifikační algoritmus založený na integrálních dvouparametrových Gaussových transformacích lineárního stacionárního
PŘEDNÁŠKA. Odhad komplexní amplitudy signálu. Odhad doby zpoždění signálu. Odhad frekvence signálu s náhodnou fází. Společný odhad doby zpoždění a frekvence signálu s náhodnou fází.
Computational Technologies Ročník 18, 1, 2013 Identifikace parametrů procesu anomální difúze na základě diferenčních rovnic A. S. Ovsienko Státní technická univerzita Samara, Rusko e-mail:
1 PROGNÓZA TRŽNÍCH PODMÍNEK PRO PETROCHEMICKÉ PODNIKY Kordunov D.Yu., Bityutsky S.Ya. Úvod. V moderních ekonomických podmínkách, které se vyznačují rychlým rozvojem globální integrace
Problém simultánní lokalizace a mapování (SLAM) Roboschool-2014 Andrey Antonov robotosha.ru 10. října 2014 Plán 1 Základy SLAM 2 RGB-D Robot SLAM 3 Andrey Antonov (robotosha.ru) Problém SLAM
MDT 004.021 T. N. Romanova, A. V. Sidorin, V. N. Solyakov, K. V. Kozlov SYNTÉZA MONOCHROMNÍHO OBRAZU Z KONSTRUKCE VÍCEROZMĚRNÉ PALETY S VYUŽITÍM ŘEŠENÍ ROVNICE JEDU
Národní technická univerzita Ukrajiny "Kyjevský polytechnický institut" Katedra přístrojů a orientačních a navigačních systémů Směrnice pro laboratorní práci v oboru "Navigace"
Digitální zpracování signálu /9 MDT 69,78 ANALYTICKÁ METODA VÝPOČTU CHYB PŘI URČOVÁNÍ ÚHLOVÉ ORIENTACE POMOCÍ SIGNÁLŮ DRUŽICOVÝCH RADIONAVIGAČNÍCH SYSTÉMŮ Aleshechkin A.M. Úvod Režim detekce
ZNAKY TVORBY POČÍTAČOVÉHO MODELU DYNAMICKÉHO OPTICKO-ELEKTRONICKÉHO SYSTÉMU Pozdnyakova N.S., Torshina I.P. Moskevská státní univerzita geodézie a kartografie Fakulta optických informací
Sborník ISA RAS 009. T. 46 III. APLIKOVANÉ PROBLÉMY DISTRIBUOVANÉ VÝPOČTY Stacionární stavy v nelineárním modelu přenosu náboje v DNA * Stacionární stavy v nelineárním modelu přenosu náboje v
V procesu automatizace technologických procesů na řídicí mechanismy a celky se musíme vypořádat s měřením různých fyzikálních veličin. Může to být tlak a průtok kapaliny nebo plynu, rychlost otáčení, teplota a mnoho dalšího. Měření fyzikálních veličin se provádí pomocí analogových senzorů. Analogový signál je datový signál, ve kterém je každý z reprezentujících parametrů popsán funkcí času a spojitou množinou možné hodnoty. Z kontinuity prostoru hodnot vyplývá, že jakýkoli šum vnesený do signálu je nerozeznatelný od užitečného signálu. Proto bude na analogovém vstupu řídicího zařízení přijata nesprávná hodnota požadované fyzikální veličiny. Proto je nutné signál přicházející ze snímače filtrovat.
Jedním z účinných filtrovacích algoritmů je Kalmanův filtr. Kalmanův filtr je rekurzivní filtr, který odhaduje stavový vektor dynamického systému pomocí série neúplných a zašuměných měření. Kalmanův filtr využívá dynamický model systému (například fyzikální zákon pohybu), řídicí akce a množinu sekvenční měření k vytvoření optimálního posouzení stavu. Algoritmus se skládá ze dvou opakovaných fází: predikce a úpravy. V první fázi je vypočítána předpověď stavu v následujícím časovém okamžiku (s přihlédnutím k nepřesnosti jejich měření). na druhém, nová informace ze senzoru koriguje predikovanou hodnotu (také s přihlédnutím k nepřesnosti a šumu této informace).
Ve fázi předpovědi:
- Předpověď stavu systému:
kde je předpověď stavu systému v aktuálním čase; – přechodová matice mezi stavy (dynamický model systému); – předpověď stavu systému v předchozím časovém okamžiku; – matice aplikace kontrolního působení; – kontrolní akce v předchozím časovém okamžiku.
- Předpověď chyby kovariance:
kde je předpověď chyby; – chyba v předchozím časovém okamžiku; – kovariance procesního šumu.
Během fáze úpravy:
- Kalmanův výpočet zisku:

kde je Kalmanův zisk; – matice měření zobrazující vztah mezi měřeními a stavy; – kovariance šumu měření.
kde je měření v aktuálním čase.
- Aktualizace chyby kovariance:
kde je matice identity.
Pokud je stav systému popsán jednou proměnnou, pak = 1 a matice se zvrhnou v obyčejné rovnice.
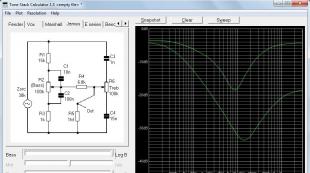
Pro jasnou demonstraci účinnosti Kalmanova filtru byl proveden experiment se snímačem hlasitosti AVR PIC KY-037, který je připojen k mikrokontroléru Arduino Uno. Obrázek 1 ukazuje graf hodnot senzoru bez použití filtru (řádek 1). Chaotické kolísání hodnoty na výstupu snímače indikuje přítomnost šumu.

Obrázek 1. Graf hodnot senzoru bez použití filtru
Pro aplikaci filtru je nutné určit hodnoty proměnných a , které určují dynamiku systému a měření. Vezměme a rovno 1 a rovno 0, protože v systému nejsou žádné kontrolní akce. Pro určení vyhlazovacích vlastností filtru je nutné vypočítat hodnotu proměnné a také vybrat hodnotu parametru.
Proměnnou spočítáme v programu Microsoft Excel 2010. K tomu je nutné vypočítat směrodatnou odchylku pro vzorek hodnot snímačů. = 0,62. zvoleno v závislosti na požadované úrovni filtrace, take = 0,001. Na obrázku 2 druhý řádek ukazuje graf hodnot snímačů pomocí filtru.

Obrázek 2. Graf odečtů senzoru pomocí Kalmanova filtru.
Z grafu můžeme usoudit, že filtr si poradil s úlohou odfiltrovat rušení, protože v ustáleném stavu jsou výkyvy ve filtrovaných hodnotách senzoru nevýznamné.
Kalmanův filtr má však významnou nevýhodu. Pokud se veličina měřená senzorem může rychle měnit, filtrované hodnoty senzoru se nezmění tak rychle jako měřená veličina. Obrázek 3 ukazuje odezvu Kalmanova filtru na skok v naměřené hodnotě.

Obrázek 3. Odezva Kalmanova filtru na skok v měřené hodnotě
Odezva filtru na skok v naměřené hodnotě se ukázala jako nevýznamná. Pokud se naměřená hodnota výrazně změní a poté se nevrátí na předchozí hodnotu, pak budou filtrované hodnoty senzoru odpovídat skutečné hodnotě naměřené hodnoty až po významné době, což je nepřijatelné pro automatické řídicí systémy, které vyžadují vysoký výkon .
Z experimentu můžeme usoudit, že je vhodné použít Kalmanův filtr pro filtrování odečtů snímačů v systémech s nízkým výkonem.
Bibliografie:
- GOST 17657-79. Přenos dat. Termíny a definice. – Moskva: Standards Publishing House, 2005. – 2 s.
- Kalmanův filtr // Wikipedie. . Datum aktualizace: 26.04.2017. URL: http://ru.wikipedia.org/?oldid=85061599 (datum přístupu: 21.05.2017).
Kalmanův filtr
Kalmanův filtr je široce používán v inženýrských a ekonometrických aplikacích, od radarových a kamerových systémů až po odhad parametrů makroekonomických modelů. Kalmanovo filtrování je důležitá část teorie řízení hraje velkou roli při tvorbě systémů řízení. Spolu s lineárně-kvadratickým regulátorem umožňuje Kalmanův filtr řešit problém lineárně-kvadratického Gaussova řízení. Kalmanův filtr a lineární kvadratický regulátor - Možné řešení nejzákladnější problémy teorie řízení.
Ve většině aplikací je počet parametrů, které definují stav objektu, větší než počet pozorovatelných parametrů dostupných pro měření. Pomocí modelu objektu založeného na řadě dostupných měření umožňuje Kalmanův filtr získat odhad vnitřního stavu.
Kalmanův filtr je určen k rekurzivnímu odhadu stavového vektoru a priori známého dynamického systému, to znamená, že pro výpočet aktuálního stavu systému je nutné znát aktuální měření, stejně jako předchozí stav samotného filtru. . Kalmanův filtr, stejně jako mnoho jiných rekurzivních filtrů, je tedy implementován v časové, nikoli frekvenční reprezentaci.
Jasným příkladem možností filtru je získávání přesných, průběžně aktualizovaných odhadů polohy a rychlosti nějakého objektu na základě výsledků časové řady nepřesných měření jeho polohy. Například v radaru je úkolem sledovat cíl, určit jeho polohu, rychlost a zrychlení, přičemž výsledky měření přicházejí postupně a jsou velmi hlučné. Kalmanův filtr používá pravděpodobnostní model dynamiky cíle, který specifikuje typ pravděpodobného pohybu objektu, což snižuje dopad hluku a poskytuje dobré odhady polohy objektu v současnosti, budoucnosti nebo minulosti.
Úvod
Kalmanův filtr pracuje s konceptem vektoru stavu systému (soubor parametrů popisujících stav systému v určitém okamžiku) a jeho statistickým popisem. V obecném případě je dynamika určitého stavového vektoru popsána hustotami pravděpodobnosti rozložení jeho složek v každém časovém okamžiku. Pokud máte určitý matematický model pozorování systému, stejně jako model apriorní změny parametrů stavového vektoru (konkrétně jako Markovův formativní proces), můžete napsat rovnici pro hustotu posteriorní pravděpodobnosti stavový vektor kdykoli. Tato diferenciální rovnice se nazývá Stratonovichova rovnice. Stratonovichova rovnice nemůže být řešena v její obecné podobě. Analytické řešení lze získat pouze v případě řady omezení (předpokladů):
- Gaussianita apriorních a posteriorních hustot pravděpodobnosti stavového vektoru v libovolném čase (včetně počátečního)
- Gaussianita tvarovacího hluku
- Gaussianita pozorovacího šumu
- bělost pozorovacího šumu
- linearita pozorovacího modelu
- linearita modelu tvářecího procesu (což, připomínám, musí být Markovův proces)
Klasický Kalmanův filtr je rovnice pro výpočet prvního a druhého momentu zadní hustoty pravděpodobnosti (ve smyslu vektoru matematických očekávání a matice rozptylů včetně reciprokých) za daných omezení. Vzhledem k tomu, že pro normální hustotu pravděpodobnosti matematické očekávání a disperzní matice zcela definují hustotu pravděpodobnosti, můžeme říci, že Kalmanův filtr vypočítává zadní hustotu pravděpodobnosti stavového vektoru v každém okamžiku. To znamená, že zcela popisuje stavový vektor jako náhodnou vektorovou veličinu.
Vypočtené hodnoty matematických očekávání jsou v tomto případě optimálními odhady podle kritéria střední kvadratické chyby, které určuje její široké použití.
Existuje několik druhů Kalmanova filtru, které se liší v aproximacích a tricích, které je třeba použít ke zmenšení filtru do popsané podoby a zmenšení jeho rozměru:
- Rozšířený Kalmanův filtr (EKF). Redukce nelineárních observačních modelů a procesu tvarování pomocí linearizace pomocí rozšíření Taylorovy řady.
- Neparfémovaný Kalmanův filtr (UKF). Používá se v problémech, ve kterých jednoduchá linearizace vede ke zničení užitečná spojení mezi složkami stavového vektoru. V tomto případě je "linearizace" založena na neparfémované transformaci.
- Ensemble Kalmanův filtr (EnKF). Používá se ke zmenšení rozměru problému.
- Možnosti jsou možné s nelineárním přídavným filtrem, který umožňuje redukovat negaussovská pozorování na normální.
- Možnosti s „bělícím“ filtrem jsou možné, což vám umožní pracovat s „barevným“ šumem
- atd.
Použitý dynamický systémový model
Kalmanovy filtry jsou založeny na časově vzorkovaných lineárních dynamických systémech. Takové systémy jsou modelovány Markovovými řetězci pomocí lineárních operátorů a termínů s normálním rozdělením. Stav systému je popsán vektorem konečné dimenze - stavovým vektorem. V každém časovém kroku lineární operátor působí na stavový vektor a převádí jej do jiného stavového vektoru (deterministická změna stavu), přidává se určitý vektor normálního šumu (náhodné faktory) a v obecném případě řídící vektor, který modeluje vliv řídicího systému. Na Kalmanův filtr lze pohlížet jako na analogii skrytých Markovových modelů s tím rozdílem, že proměnné popisující stav systému jsou prvky nekonečné množiny reálných čísel (na rozdíl od konečné množiny stavového prostoru ve skrytých Markovových modelech). Skryté Markovovy modely mohou navíc používat libovolná rozdělení pro následné hodnoty stavového vektoru, na rozdíl od Kalmanova filtru, který používá model normálně rozděleného šumu. Mezi rovnicemi Kalmanova filtru a je přísný vztah skrytý model Marková. Přehled těchto a dalších modelů podávají Roweis a Chahramani (1999).
Při použití Kalmanova filtru k získání odhadů vektoru stavu procesu ze série šumových měření je nutné reprezentovat model tento proces v souladu se strukturou filtru - ve formě maticové rovnice určitého typu. Za každý úder k provozu filtru je nutné určit matice v souladu s níže uvedeným popisem: vývoj procesu F k; pozorovací matice H k; procesní kovarianční matice Q k; měření šumu kovarianční matice R k; za přítomnosti kontrolních akcí - matice jejich koeficientů B k .
Ilustrace, jak filtr funguje. Matice jsou označeny čtverečky. Elipsy označují matice vícerozměrných normálních rozdělení (včetně středních hodnot a kovariancí). Vektory jsou ponechány nezakroužkované. V nejjednodušším případě se některé matice v průběhu času nemění (nezávisí na indexu k), ale jsou stále používány filtrem v každém cyklu provozu.
Model systému/procesu předpokládá, že skutečný stav v daném okamžiku k se získává ze skutečného stavu v tuto chvíli k−1 podle rovnice:
,- F k- matice vývoje procesu/systému, která ovlivňuje vektor X k−1 (stavový vektor v tuto chvíli k−1 );
- B k- řídicí matice, která se aplikuje na vektor řídicích akcí u k ;
- w k- normální náhodný proces s nulovým matematickým očekáváním a kovarianční maticí Q k, která popisuje náhodnou povahu vývoje systému/procesu:
V tuto chvíli k se provádí pozorování (měření). z k vektor skutečného stavu X k, které spolu souvisí rovnicí:
Kde H k- matice měření spojující vektor skutečného stavu a vektor provedených měření, proti k- bílý Gaussův šum měření s nulovým matematickým očekáváním a kovarianční maticí R k :
Počáteční stav a vektory náhodných procesů v každém hodinovém cyklu ( X 0 , w 1 , …, w k , proti 1 , …, proti k) jsou považovány za nezávislé.
Mnoho skutečných dynamických systémů nelze tímto modelem přesně popsat. V praxi může dynamika nezohledněná v modelu vážně zkazit výkon filtru, zejména při práci s neznámým stochastickým vstupním signálem. Navíc dynamika, která není v modelu zohledněna, může způsobit nestabilitu filtru. Na druhou stranu nezávislý bílý šum jako signál nezpůsobí divergenci algoritmu. Problém oddělení šumu měření od dynamiky nezohledněné v modelu je komplexní, řeší se pomocí teorie robustních řídicích systémů.
Kalmanův filtr
Kalmanův filtr je typ rekurzivního filtru. Pro výpočet hodnocení stavu systému pro aktuální cyklus provozu potřebuje posouzení stavu (formou hodnocení stavu systému a odhadu chyby při zjišťování tohoto stavu) na předchozí cyklus provozu a měření v aktuálním cyklu. Tato vlastnost jej odlišuje od paketových filtrů, které vyžadují znalost historie měření a/nebo odhadů během aktuálního cyklu provozu. Dále, zápisem budeme rozumět odhadu skutečného vektoru v tuto chvíli n s přihlédnutím k měřením od okamžiku zahájení práce do m včetně.
Stav filtru je určen dvěma proměnnými:
Iterace Kalmanova filtru jsou rozděleny do dvou fází: extrapolace a korekce. Během extrapolace filtr přijímá předběžné posouzení stav systému (v ruskojazyčné literatuře se často označuje , kde znamená „extrapolace“ a k- číslo ticku, ve kterém bylo přijato) pro aktuální krok podle konečného hodnocení stavu z předchozího kroku (nebo předběžný odhad pro další tik podle konečného hodnocení aktuálního kroku, v závislosti na výklad). Tento předběžný odhad se také nazývá apriorní odhad stavu, protože k jeho získání nepoužívá pozorování odpovídajícího kroku. Ve fázi korekce je apriorní extrapolace doplněna o relevantní měření proudu pro korekci odhadu. Upravený odhad se také nazývá posteriorní odhad stavu nebo jednoduše odhad stavového vektoru. Obvykle se tyto dvě fáze střídají: extrapolace se provádí na základě výsledků korekce do dalšího pozorování a korekce se provádí společně s pozorováními dostupnými v dalším kroku atd. Je však možný i jiný vývoj událostí, pokud pro z nějakého důvodu se ukázalo, že pozorování není k dispozici, může být fáze korekce přeskočena a extrapolována z neupraveného odhadu (a priori extrapolace). Podobně, pokud jsou nezávislá měření k dispozici pouze v určitých pracovních cyklech, jsou stále možné korekce (obvykle pomocí jiné pozorovací matice H k ).
Extrapolační fáze
Fáze korekce
| Odchylka přijatá v kroku k pozorování z pozorování očekávaného z extrapolace: | |
| Kovarianční matice pro vektor odchylky (vektor chyby): | |
| Kalmanova matice optimálního zisku, vytvořená na základě kovariančních matic stávající extrapolace stavového vektoru a získaných měření (prostřednictvím kovarianční matice vektoru odchylky): | |
| Oprava dříve získané extrapolace stavového vektoru - získání odhadu stavového vektoru systému: | |
| Výpočet kovarianční matice pro odhad vektoru stavu systému: |
Výraz pro kovarianční matici odhadu vektoru stavu systému je platný pouze při použití daného optimálního vektoru koeficientů. Obecně má tento výraz složitější formu.
Invarianty
Pokud je model naprosto přesný a naprosto přesně specifikovaný počáteční podmínky a poté se po libovolném počtu iterací filtru zachovají následující hodnoty – jedná se o invarianty:
Matematická očekávání odhadů a extrapolací vektoru stavu systému a matic chyb jsou nulové vektory:
kde je matematické očekávání.
Vypočítané kovarianční matice extrapolací, odhady stavu systému a chybové vektory se shodují se skutečnými kovariančními maticemi:
Příklad konstrukce filtru
Představme si vozík stojící na nekonečně dlouhých kolejích bez tření. Zpočátku je v klidu v poloze 0, ale pod vlivem náhodných faktorů podléhá náhodnému zrychlení. Polohu vozíku měříme každé ∆ t sekund, ale měření jsou nepřesná. Chceme získat odhady polohy vozíku a jeho rychlosti. Aplikujme na tento problém Kalmanův filtr a určíme všechny potřebné matice.
V tomto problému matice F , H , R A Q nezávisí na čase, jejich indexy vynecháme. Navíc neovládáme vozík, takže ovládací matici B nepřítomný.
Souřadnice a rychlost vozíku jsou popsány vektorem v lineární prostor státy
kde je rychlost (první derivace souřadnice vzhledem k času).
Budeme předpokládat, že mezi ( k−1) a k v tomto cyklu se vozík pohybuje konstantním zrychlením a k, rozdělené podle normálního zákona s nulovým matematickým očekáváním a směrodatnou odchylkou σa. V souladu s newtonovskou mechanikou můžeme psát
.Kovarianční matice náhodných efektů
(σ A- skalární).V každém kroku práce se měří poloha vozíku. Předpokládejme, že chyba měření vk má normální rozdělení s nulovým matematickým očekáváním a směrodatnou odchylkou σ z. Pak
a kovarianční matice šumu pozorování má tvar
.Počáteční poloha vozíku je přesně známa
, .Pokud je poloha a rychlost vozíku známa pouze přibližně, lze matici rozptylu inicializovat dostatečně velkým číslem L, takže počet převyšuje rozptyl souřadnicových měření
, .V tomto případě bude filtr v prvních cyklech provozu používat výsledky měření s větší váhou než dostupné apriorní informace.
Odvozování vzorců
Kovarianční matice odhadu stavových vektorů
Podle definice kovarianční matice P k|k
nahraďte výraz, abyste odhadli stavový vektor
a napište výraz pro chybový vektor
a vektory měření
vyjmeme vektor chyby měření proti k
od vektoru chyby měření proti k není v korelaci s jinými argumenty, dostaneme výraz
v souladu s vlastnostmi vektorové kovariance je tento výraz transformován do formy
nahrazením výrazu pro kovarianční matici extrapolace stavového vektoru P k|k−1 a stanovení kovarianční matice pozorovacího šumu na R k, dostaneme
Výsledný výraz je platný pro matici libovolných koeficientů, ale pokud se jedná o matici Kalmanových optimálních koeficientů, pak lze tento výraz pro kovarianční matici zjednodušit.
Matrix optimálního zisku
Kalmanův filtr minimalizuje součet čtverců matematických očekávání chyb odhadu stavového vektoru.
Vektor chyby odhadu stavového vektoru
Úkolem je minimalizovat součet matematických očekávání druhých mocnin složek daného vektoru
,což je ekvivalentní minimalizaci stopy kovarianční matice odhadu stavového vektoru P k|k. Dosadíme existující výrazy do výrazu pro kovarianční matici odhadu stavového vektoru a doplníme na úplný čtverec:
Všimněte si, že poslední člen je kovarianční matice nějaké náhodné veličiny, takže její stopa je nezáporná. Minimum trasování je dosaženo, když je poslední člen nastaven na nulu:
Tvrdí se, že tato matice je požadovaná a při použití jako matice koeficientů v Kalmanově filtru minimalizuje součet středních čtvercových chyb při odhadu stavového vektoru.
Kovarianční matice odhadu stavových vektorů pomocí matice optimálních koeficientů
Výraz pro kovarianční matici odhadu stavového vektoru P k|k při použití optimální matice koeficientů bude mít tvar:
Tento vzorec je výpočetně jednodušší, a proto se v praxi používá téměř vždy, ale správný je pouze při použití matice optimálních koeficientů. Pokud z důvodu nízké výpočetní přesnosti nastane problém s výpočetní stabilitou nebo se specificky použije jiná než optimální matice koeficientů, měl by se použít obecný vzorec pro kovarianční matici odhadu stavových vektorů.
Kalmanův filtr je pravděpodobně nejpopulárnějším filtrovacím algoritmem používaným v mnoha oblastech vědy a techniky. Pro svou jednoduchost a efektivitu jej nalezneme v GPS přijímačích, procesorech senzorových dat, při implementaci řídicích systémů atd.
Na internetu je mnoho článků a knih o Kalmanově filtru (většinou v angličtině), ale tyto články mají poměrně vysokou bariéru pro vstup, je zde mnoho nejasných míst, i když ve skutečnosti jde o velmi jasný a transparentní algoritmus. Pokusím se vám o tom vyprávět jednoduchým jazykem, s postupným zvyšováním složitosti.
K čemu to je?
Každý měřicí přístroj má nějakou chybu a může být ovlivněn velký počet vnější a vnitřní vlivy, což vede k tomu, že informace z ní jsou zašuměné. Čím hlučnější jsou data, tím obtížnější je takové informace zpracovat.Filtr je algoritmus zpracování dat, který odstraňuje šum a zbytečné informace. V Kalmanově filtru je možné specifikovat apriorní informace o charakteru systému, vztahu proměnných a na základě toho sestavit přesnější odhad, ale i v tom nejjednodušším případě (bez zadávání apriorních informací) dává vynikající výsledky.
Uvažujme nejjednodušší příklad- Předpokládejme, že potřebujeme kontrolovat hladinu paliva v nádrži. K tomu je v nádrži instalován kapacitní snímač, který se velmi snadno udržuje, má však některé nevýhody - např. závislost na plněném palivu (dielektrická konstanta paliva závisí na mnoha faktorech, např. teplotě; ), a velký vliv „lahvovosti“ v nádrži. Ve výsledku tak informace z něj představují typickou „pilu“ se slušnou amplitudou. Tyto typy senzorů jsou často instalovány na těžkých důlních zařízeních (nenechte se zmást objemem nádrže):
Kalmanův filtr
Pojďme trochu odbočit a seznámit se se samotným algoritmem. Kalmanův filtr využívá dynamický model systému (například fyzikální zákon pohybu), známé řídicí vstupy a vícenásobná sekvenční měření k vytvoření optimálního odhadu stavu. Algoritmus se skládá ze dvou opakovaných fází: predikce a úpravy. V první fázi se počítá predikce stavu v dalším časovém okamžiku (s přihlédnutím k nepřesnosti jejich měření). Na druhém nové informace ze senzoru opraví předpokládanou hodnotu (také s přihlédnutím k nepřesnosti a šumu těchto informací):Rovnice jsou uvedeny ve formě matice, pokud neznáte lineární algebru, nevadí, následuje zjednodušená verze bez matic pro případ s jednou proměnnou. V případě jedné proměnné matice degenerují do skalárních hodnot.
Nejprve si porozuměme zápisu: dolní index označuje okamžik v čase: k - aktuální, (k-1) - předchozí, znaménko mínus v horním indexu znamená, že tento předpověděl střední hodnota.
Popisy proměnných jsou uvedeny na následujících obrázcích:
Můžete dlouze a zdlouhavě popisovat, co všechny tyto záhadné přechodové matice znamenají, ale podle mého názoru je lepší skutečný příklad pokuste se použít algoritmus, aby abstraktní významy získaly skutečný význam.
Zkusme to v akci
Vraťme se k příkladu se snímačem hladiny paliva, protože stav systému je reprezentován jednou proměnnou (objem paliva v nádrži), matice degenerují do obyčejných rovnic:Definování procesního modelu
Aby bylo možné použít filtr, je nutné určit matice/hodnoty proměnných, které určují dynamiku systému a rozměry F, B a H:F- proměnná popisující dynamiku systému v případě paliva - může to být koeficient, který určuje spotřebu paliva při volnoběhu během doby vzorkování (doba mezi kroky algoritmu). Ovšem kromě spotřeby paliva existují i čerpací stanice...takže pro jednoduchost nastavíme tuto proměnnou na 1 (tedy naznačíme, že predikovaná hodnota bude rovna předchozímu stavu).
B- proměnná určující uplatnění řídícího působení. Pokud bychom měli další informace o otáčkách motoru nebo míře sešlápnutí plynového pedálu, pak by tento parametr určoval, jak by se během vzorkovací periody změnila spotřeba paliva. Protože v našem modelu nejsou žádné kontrolní akce (nejsou o nich žádné informace), akceptujeme B = 0.
H- matici definující vztah mezi měřeními a stavem systému, prozatím bez vysvětlení přijmeme tuto proměnnou také rovnou 1.
Definování vyhlazovacích vlastností
R- chybu měření lze zjistit testováním měřicích přístrojů a určením chyby jejich měření.Q- stanovení procesního šumu je obtížnější úkol, protože je nutné určit rozptyl procesu, což není vždy možné. V každém případě můžete zvolit tento parametr pro zajištění požadované úrovně filtrace.
Pojďme to implementovat do kódu
Abychom rozptýlili zbývající zmatky, implementujme zjednodušený algoritmus v C# (bez matic a kontrolních akcí):třída KalmanFilterSimple1D
{
public double X0 (get; private set;) // predikovaný stav
public double P0 ( get; private set; ) // předpokládaná kovariance
Public double F ( get; private set; ) // faktor skutečné hodnoty na předchozí skutečnou hodnotu
public double Q ( get; private set; ) // šum měření
public double H ( get; private set; ) // faktor naměřené hodnoty na skutečnou hodnotu
public double R ( get; private set; ) // hluk prostředí
Veřejný dvojitý stav ( get; private set; )
veřejná dvojitá kovariance ( get; private set; )
Public KalmanFilterSimple1D(double q, double r, double f = 1, double h = 1)
{
Q = q;
R = r;
F = f;
H = h;
}
Public void SetState (dvojitý stav, dvojitá kovariance)
{
Stát = stát;
Kovariance = kovariance;
}
Veřejné neplatné Správně (dvojité údaje)
{
//aktualizace času - předpověď
X0 = F*stav;
PO = F*Kovariance*F + Q;
//aktualizace měření - oprava
var K = H*PO/(H*PO*H + R);
Stav = X0 + K*(data - H*X0);
Kovariance = (1 - K*H)*F;
}
}
// Aplikace...
Var palivoData = GetData();
var filter = new List();
Var kalman = new KalmanFilterSimple1D(f: 1, h: 1, q: 2, r: 15); // nastavte F, H, Q a R
kalman.SetState(fuelData, 0,1); // Nastavte počáteční hodnoty State a Covariance
foreach (var d in fuelData)
{
kalman.Správně(d); // Aplikujte algoritmus
Filtered.Add(kalman.State); // Uložit Současný stav
}
Výsledek filtrování s těmito parametry je znázorněn na obrázku (pro úpravu stupně vyhlazení můžete změnit parametry Q a R):
Nejzajímavější část zůstává mimo rámec článku - použití Kalmanova filtru pro několik proměnných, určení vztahu mezi nimi a automatické vygenerování hodnot pro nepozorované proměnné. Pokusím se v tématu pokračovat, jakmile budu mít čas.
Doufám, že popis nebyl příliš zdlouhavý a složitý, pokud máte nějaké dotazy nebo upřesnění, vítám vás v komentářích)
Random Forest je jeden z mých oblíbených algoritmů pro dolování dat. Za prvé, je neuvěřitelně všestranný, lze jej použít k řešení regresních i klasifikačních problémů. Hledejte anomálie a vyberte prediktory. Za druhé, toto je algoritmus, který je opravdu obtížné nesprávně aplikovat. Jednoduše proto, že na rozdíl od jiných algoritmů má málo přizpůsobitelných parametrů. A také je překvapivě jednoduché povahy. A přitom je úžasně přesný.
Jaká je myšlenka za tak úžasným algoritmem? Myšlenka je jednoduchá: řekněme, že máme nějaký velmi slabý algoritmus, řekněme . Pokud uděláme hodně různé modely s použitím tohoto slabého algoritmu a zprůměrováním výsledku jejich předpovědí bude konečný výsledek výrazně lepší. Tomu se říká souborové učení v akci. Algoritmus Random Forest se proto pro přijatá data nazývá „Random Forest“, vytváří mnoho rozhodovacích stromů a poté zprůměruje výsledek jejich předpovědí. Důležitý bod Ve stvoření každého stromu je prvek náhody. Je přece jasné, že pokud vytvoříme mnoho stejných stromů, tak výsledek jejich zprůměrování bude mít přesnost jednoho stromu.
Jak pracuje? Předpokládejme, že máme nějaká vstupní data. Každý sloupec odpovídá nějakému parametru, každý řádek odpovídá nějakému datovému prvku.
Z celé datové sady můžeme náhodně vybrat určitý počet sloupců a řádků a na jejich základě sestavit rozhodovací strom.

Čtvrtek 10. května 2012
Čtvrtek 12. ledna 2012

To je vše. 17hodinový let je u konce, Rusko zůstává v zámoří. A oknem útulného bytu se 2 ložnicemi se na nás dívá San Francisco, slavné Silicon Valley, Kalifornie, USA. Ano, to je přesně ten důvod, proč v poslední době moc nepíšu. Přestěhovali jsme se.
Všechno to začalo v dubnu 2011, kdy jsem měl telefonický rozhovor se Zyngou. Pak mi to všechno připadalo jako nějaká hra nesouvisející s realitou a vůbec jsem si nedokázal představit, k čemu to povede. V červnu 2011 přijela Zynga do Moskvy a provedla sérii pohovorů, bylo zváženo asi 60 kandidátů, kteří prošli telefonickým pohovorem a z nich bylo vybráno asi 15 lidí (přesný počet nevím, někteří si to později rozmysleli, jiní okamžitě odmítl). Rozhovor se ukázal být překvapivě jednoduchý. Žádné problémy s programováním, žádné záludné otázky o tvaru poklopů, většinou testování vaší schopnosti chatovat. A znalosti byly podle mě hodnoceny jen povrchně.
A pak začal rigmarole. Nejdřív jsme čekali na výsledky, pak nabídka, pak schválení LCA, pak schválení petice o vízum, pak dokumenty z USA, pak fronta na ambasádě, pak dodatečné ověření, pak vízum. Chvílemi se mi zdálo, že jsem připravený všechno vzdát a dát gól. Občas jsem pochyboval, zda tu Ameriku potřebujeme, ostatně ani Rusko není špatné. Celý proces trval asi šest měsíců, nakonec jsme v polovině prosince dostali víza a začali se připravovat na odlet.
Pondělí byl můj první pracovní den na novém místě. Kancelář má všechny podmínky nejen k práci, ale i bydlení. Snídaně, obědy a večeře od vlastních kuchařů, spousta pestrého jídla nacpaného na každém rohu, posilovna, masáže a dokonce i kadeřník. To vše je pro zaměstnance zcela zdarma. Mnoho lidí dojíždí do práce na kole a několik místností je vybaveno pro uskladnění vozidel. Obecně jsem v Rusku nikdy nic takového neviděl. Všechno má však svou cenu, hned jsme byli upozorněni, že budeme muset hodně pracovat. Co je podle jejich měřítek „hodně“, mi není příliš jasné.
Doufám ale, že i přes množství práce se mi v dohledné době podaří obnovit blogování a třeba povědět něco o americkém životě a práci programátora v Americe. Počkej a uvidíš. Zatím všem přeji šťastný Nový rok a Vánoce a zase na viděnou!
Pro příklad použití si vytiskněme dividendový výnos ruské společnosti. Jako základní cenu bereme závěrečnou cenu akcie v den uzavření registru. Z nějakého důvodu tyto informace nejsou na webu Trojky dostupné, ale jsou mnohem zajímavější než absolutní hodnoty dividend.
Pozornost! Spuštění kódu trvá poměrně dlouho, protože... Pro každou promo akci musíte zadat požadavek na servery finam a získat její hodnotu.
Výsledek<- NULL for(i in (1:length(divs[,1]))){ d <- divs if (d$Divs>0)( zkuste(( uvozovky<- getSymbols(d$Symbol, src="Finam", from="2010-01-01", auto.assign=FALSE) if (!is.nan(quotes)){ price <- Cl(quotes) if (length(price)>0) (dd<- d$Divs result <- rbind(result, data.frame(d$Symbol, d$Name, d$RegistryDate, as.numeric(dd)/as.numeric(price), stringsAsFactors=FALSE)) } } }, silent=TRUE) } } colnames(result) <- c("Symbol", "Name", "RegistryDate", "Divs") result

Podobně můžete vytvářet statistiky za předchozí roky.