پورتال اطلاعات امنیتی استفاده از فیلتر کالمن برای فیلتر کردن مقادیر از حسگرها فیلتر کالمن برای سیستم های غیرخطی
رونوشت
1 # 09، سپتامبر 2015 UDC استفاده از فیلتر کالمن برای پردازش دنباله ای از مختصات GPS Listerenko R.R.، کارشناسی روسیه، مسکو، MSTU. N.E. باومن، گروه نرم افزار کامپیوتر و فناوری اطلاعات» سرپرست علمی: Bekasov D.E.، دستیار روسیه، مسکو، MSTU به نام. N.E. باومن، دپارتمان نرم افزار کامپیوتر و فناوری اطلاعات وظیفه فیلتر کردن مختصات GPS در حال حاضر از خدمات ردیابی GPS به طور گسترده استفاده می شود که وظیفه آن ردیابی مسیرهای اشیاء مشاهده شده به منظور ذخیره آنها و تکثیر و تجزیه و تحلیل بیشتر آنها است. اما به دلیل خطای سنسور GPS به دلایلی مانند از دست دادن سیگنال از ماهواره، تغییر در هندسه ماهواره، انعکاس سیگنال، خطاهای محاسباتی و خطاهای گرد کردن، نتیجه نهایی دقیقاً با مسیر مطابقت ندارد. از شی هم انحرافات جزئی (در 100 متر) وجود دارد که مانع درک اطلاعات بصری در مورد مسیر و تجزیه و تحلیل آن نمی شود و هم انحرافات بسیار مهم (تا 1 کیلومتر، در صورت از دست دادن سیگنال ماهواره و استفاده از ایستگاه های پایهتا چند ده کیلومتر). برای نشان دادن نتیجه الگوریتم ارائه شده در مقاله، مسیری حاوی انحرافات از مکان واقعی بیش از چندین کیلومتر استفاده شده است. به منظور اصلاح چنین خطاهایی، الگوریتمی در حال توسعه است که دنباله ای از مختصات را تبدیل می کند. داده های ورودی برای الگوریتم دنباله ای از مختصات GPS است. هر مختصات حاوی اطلاعات زیر است که از حسگر دریافت می شود: عرض جغرافیایی طول جغرافیایی آزیموت بر حسب درجه سرعت لحظه ای جسم در یک نقطه معین بر حسب متر بر ثانیه
2 انحراف احتمالی مختصات جسم از مقدار واقعی بر حسب متر زمان دریافت مختصات توسط سنسور نتیجه الگوریتم دنباله ای از مختصات با طول و عرض جغرافیایی اصلاح شده است. تصمیم گرفته شد که از فیلتر کالمن به عنوان پایه ای برای ساخت الگوریتم استفاده شود، زیرا به ما اجازه می دهد تا به طور جداگانه خطاهای اندازه گیری و خطاهای فرآیند تصادفی را در نظر بگیریم و همچنین از سرعت حرکت جسم به دست آمده از سنسور استفاده کنیم. ساخت و ساز مدل ریاضیاستفاده از فیلتر کالمن برای استفاده از فیلتر کالمن، لازم است که فرآیند مورد مطالعه به صورت زیر شرح داده شود: = + + (1) = + (2) در فرمول (1) - بردار حالت فرآیند، A - ماتریس از بعد n n، انتقال فرآیند مشاهده شده از حالت به شرایط را توصیف می کند. بردار تأثیرات کنترلی بر فرآیند را توصیف می کند. ماتریس B بعد n l بردار اقدامات کنترلی u را در تغییر حالت s ترسیم می کند. یک متغیر تصادفی است که خطاهای فرآیند مورد مطالعه را توصیف می کند، و ~0، که در آن Q ماتریس کوواریانس خطاهای فرآیند است. فرمول (2) اندازه گیری یک فرآیند تصادفی را توصیف می کند. - بردار حالت اندازه گیری شده فرآیند، ماتریس H با بعد m n وضعیت فرآیند را در بعد فرآیند منعکس می کند. - یک متغیر تصادفی که خطاهای اندازه گیری را مشخص می کند، و ~0، که در آن P ماتریس کوواریانس خطاهای اندازه گیری است. از آنجایی که روند حرکت یک جسم در حال مطالعه است، معادله حالت بر اساس معادله حرکت جسم = + +!" #$ % & " جمع آوری می شود. علاوه بر این، وجود ندارد اطلاعات اضافیدر مورد فرآیند حرکت، بنابراین در نظر گرفته می شود که عمل کنترل برابر با 0 است. بردار = + () *، - به عنوان حالت فرآیند در نظر گرفته می شود. +، که در آن x، y مختصات جسم هستند و پیش بینی سرعت جسم هستند. بنابراین، برای فرآیند مورد بررسی، معادله (1) به شکل زیر است: = + /!، (3) بولتن علمی و فنی جوانان FS، ISSN
3 کجا = ! = 3! + 7 " 0 ; 6 2: 6 " / = : 6 0: 6 2: 6 0: , (4)!,4, (5) (6) در این مدل شتاب یک جسم به صورت تصادفی در نظر گرفته می شود. خطای فرآیند مفروضات زیر مطرح می شود: الف) شتاب ها در امتداد محورهای مختلف متغیرهای تصادفی مستقل هستند.)* ب)
4 = AB = C. C E. = C/!!. /. =/C!!. /. از آنجایی که اجزای بردار ak (5) متغیرهای تصادفی مستقل هستند، پس C!!. = " 0 " G. در نتیجه، فرمول (7) به شکل زیر است: = / " (8) بردار اندازه گیری zk برای این مسئله به صورت زیر نمایش داده می شود: H I = 0 + J, J (7) 2, (9) که در آن H، I - مختصات جسم دریافت شده از سنسور، J +، J، - سرعت جسم به دست آمده از سنسور ماتریس H در فرمول (2) برابر با ماتریس هویت بعد 4 در نظر گرفته می شود از آنجایی که در چارچوب این مسئله فرض می شود که اندازه گیری یک بردار حالت خطی است و ماتریس کوواریانس خطای اندازه گیری R داده شده است. گزینه های ممکنمحاسبات آن استفاده از داده ها در مورد دقت اندازه گیری مورد انتظار به دست آمده از سنسور است. کاربرد فیلتر کالمن در مدل ساخته شده برای اعمال فیلتر، لازم است مفاهیم زیر را معرفی کنیم: - تخمین پسینی از وضعیت جسم در لحظه k که از نتایج مشاهدات تا لحظه k به دست می آید. L تخمین خلفی تصحیح نشده وضعیت جسم در زمان k است. - یک ماتریس کوواریانس پسینی از خطاها، که تخمینی از دقت تخمین به دست آمده از بردار حالت را مشخص می کند و شامل برآوردی از واریانس های خطای حالت محاسبه شده و کوواریانس ها است که روابط شناسایی شده بین پارامترهای وضعیت سیستم را نشان می دهد. L ماتریس خطای کوواریانس خلفی تعدیل نشده است. ماتریس P0 به عنوان صفر تنظیم می شود، زیرا فرض می شود که موقعیت اولیه شی مشخص است. بولتن علمی و فنی جوانان FS، ISSN
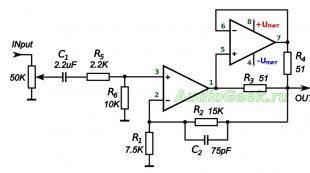
5 یک تکرار فیلتر کالمن شامل دو مرحله است: برون یابی و تصحیح. الف) در مرحله برون یابی، برآورد L از تخمین بردار حالت L و ماتریس کوواریانس خطاهای L طبق فرمول های زیر محاسبه می شود: L =، (10) L =. +، (11) جایی که ماتریس Ak از فرمول (4) شناخته می شود، ماتریس Qk با استفاده از فرمول (8) محاسبه می شود. ب) در مرحله تصحیح، ماتریس عوامل بهره Kk با استفاده از فرمول زیر محاسبه می شود: M = L. L. + (12) که در آن R، H شناخته شده در نظر گرفته می شوند. Kk برای تصحیح تخمین وضعیت شی L و ماتریس کوواریانس خطا L به شرح زیر استفاده می شود: = L + M L، (13) = N M L، (14) که در آن I ماتریس هویت است. لازم به ذکر است که برای استفاده از روابط فوق، لازم است که واحدهای اندازه گیری برای پارامترهای شی درگیر در محاسبات سازگار باشند. با این حال، در داده های منبع، طول و عرض جغرافیایی در مختصات زاویه ای و سرعت در مختصات متریک آورده شده است. علاوه بر این، تعیین شتاب برای محاسبه خطای فرآیند در واحدهای متریک نیز راحت تر است. از فرمول های وینسنتی برای تبدیل سرعت و شتاب به واحدهای زاویه ای استفاده می شود. نتیجه فیلتر در شکل. 1 نمونه ای از یک مسیر را قبل از پردازش نشان می دهد. متوجه خواهید شد که در این مثال چند مختصات با وجود دارد درجه بالاخطاهایی که در حضور "قله" مختصات به طور قابل توجهی از مسیر اصلی حذف شده است. در شکل شکل 2 نتیجه کار فیلتر با این مسیر را نشان می دهد.

6 شکل 1. مسیر شی شکل. 2. مسیر جسم پس از اعمال فیلتر در نتیجه عملا هیچ "قله ای" وجود ندارد، به استثنای بزرگترین مورد که به طور محسوسی کاهش یافت و بقیه مسیر هموار شد. بدین ترتیب با استفاده از الگوریتم فوق می توان میزان اعوجاج مسیر را کاهش داد و کیفیت بصری آن را افزایش داد. نتیجهگیری این مقاله رویکردی برای تصحیح مختصات GPS با استفاده از فیلتر کالمن را بررسی میکند. با استفاده از الگوریتم فوق، میتوان مشهودترین اعوجاجهای مسیر را حذف کرد که کاربردپذیری را نشان میدهد. این روشبه مشکل هموارسازی مسیر و حذف پیک. با این حال، برای بهبود بیشتر کیفیت الگوریتم، پردازش اضافی توالی مختصات برای اهداف بولتن علمی و فنی جوانان FS، ISSN ضروری است.
7 حذف نقاط زائد که در صورت عدم حرکت جسم مشاهده شده به وجود می آیند. منابع 1. Yadav J., Giri R., Meena L. Error handling in GPS data processing // Mausam Vol. 62. شماره 1. P Kalman R. E. A New Approach to Linear Filtering and Prediction Problems // Transactions of the ASME Journal of Basic Engineering Vol. 82. شماره سری D. P. P. Welch G., Bishop G. An Introduction to the Kalman Filter: Tech. نماینده TR موجود در: دسترسی به Vincenty T. Direct and Inverse Solutions of Geodesics on the Ellipsoid with application of nested equations // Survey Review apr. جلد 23. بدون PP
الگوریتم UDC 519.711.2 برای تخمین پارامترهای جهت گیری فضاپیما با استفاده از فیلتر کالمن D. I. Galkin 1 1 MSTU im. N.E. باومن، مسکو، 155، روسیه توضیحاتی در مورد ساخت فیلتر کالمن داده شده است
آژانس فدرال برای مقررات فنی و اندازه گیری استاندارد ملی فدراسیون روسیه GOST R 53608-2009 ناوبری جهانی سیستم ماهواره ایروش ها و فن آوری های پیاده سازی
پیشبینی سریهای زمان بیزی بر اساس مدلهای فضای ایالتی V I Lobach Belorussky دانشگاه دولتیمینسک بلاروس پست الکترونیکی: lobach@bsub یک روش پیش بینی در نظر گرفته شده است
UDC 681.5(07) شناسایی اشیاء دینامیک غیرخطی در دامنه زمان D.N. ویاتچنیکوف، وی. کوزوبوتسکی، A.A. نوسنکو، N.V. Plotnikova اطلاعات ناکافی در مورد اشیاء در طول توسعه آنها
سر. 0. 200. شماره. 4 بولتن فرآیندهای کنترل دانشگاه سنت پترزبورگ UDC 539.3 V. V. عملکردهای مجازات کارلین در مسئله مدیریت فرآیند مشاهده. مقدمه. مقاله به مشکل اختصاص داده شده است
الگوریتمهای UDC 63.1/.7 برای پردازش اطلاعات ثانویه در یک ایستگاه راداری با انواع مختلف ماتریس مکالمه دینامیک هنگام تعیین مختصات زاویه ارتفاع Yanitskiy. ناظر علمی
UDC 5979 + 5933 G A Omarova 630090, Russia پست الکترونیکی: gulzira@ravccru move
مقدمه ای بر رباتیک سخنرانی 12. قسمت 2. ناوبری و نقشه برداری. SLAM SLAM محلی سازی و نقشه برداری همزمان (محلی سازی و نقشه برداری همزمان) وظیفه SLAM یکی از
یادداشت های سخنرانی «سیستم های دینامیکی خطی. فیلتر کالمن." برای درس تخصصی "روش های ساختاری تحلیل تصویر و سیگنال" 211 برنامه آموزشی: برخی از ویژگی های توزیع نرمال. اجازه دهید x R d توزیع شود
سیستم محلی سازی ربات بر اساس دوربین نیمکره ای الکساندر اوچینیکوف، گروه هوآفان رادیو الکترونیک دانشگاه دولتی تولا، تولا، روسیه [ایمیل محافظت شده], [ایمیل محافظت شده]
مجموعه مقالات MAI شماره 84 UDC 57:5198 wwwmairu/science/trudy/ تعیین خطاهای یک سیستم ناوبری اینرسی بدون گیمبال در حالت های تاکسی و شتاب Vavilova NB* Golovan AA Kalchenko AO** Moscow
# 08، اوت 2016 UDC 004.93 "1 عادی سازی داده های دوربین سه بعدی با استفاده از روش مؤلفه اصلی برای حل مشکل تشخیص وضعیت ها و رفتار کاربران خانه هوشمند Malykh D.A.، دانشجوی روسیه،
دانشگاه فنی ملی اوکراین "موسسه پلی تکنیک کیف" گروه ابزار و جهت گیری و سیستم های ناوبری رهنمودهابرای کارهای آزمایشگاهی در رشته "ناوبری
UDC 629.78.018:621.397.13 METOD OF Paired Distances in the problem of Flight Adjustment OF ASTRO Sensors OF A Space Car SYSTEM B.M. سوخویلوف با افزایش دقت و قابلیت اطمینان داده های نجومی،
UDC 629.05 حل مشکل ناوبری با استفاده از سیستم ناوبری اینرسیال و سیستم سیگنال هوا Mkrtchyan V.I.، دانشجوی گروه "ابزار و سیستم های جهت گیری، تثبیت و ناوبری"
مدل سیستم بصری اپراتور انسانی در تشخیص تصویر شی Yu.S. گلینا، وی.یا. دانشگاه فنی دولتی کولیوچکین مسکو به نام. N.E. باومن، ریاضیات را توضیح می دهد
مهندسی موشک و ابزارهای فضایی و سیستم های اطلاعاتی 2015، جلد 2، شماره 3، ص. 79 83 UDC 681.3.06 تجزیه و تحلیل سیستم، کنترل وسایل نقلیه فضایی، پردازش اطلاعات و سیستم های تله متری
سیستم های دینامیکی خطی فیلتر کالمن برنامه آموزشی: برخی از خواص توزیع نرمال چگالی توزیع.4.3.. -4 x b.5 x b =.7 5 p(x a x b =.7) - x p(x a,x b) p(x a) 4 3 - - -3 x.5
UDC 621.396.671 O. S. Litvinov, A. A. Gilyazova ارزیابی با استفاده از روش نمودارهای خود تأثیر گروههای تداخل بر دریافت وسیله سیگنال مفید EFUD
UDC 681.5.15.44 PRONOSIS OF PIECELE-Stationary Processes E.Yu. آلکسیوا فرآیندهای تصادفی گسسته حاوی پارامترهایی که به طور ناگهانی در زمانهای تصادفی تغییر میکنند در نظر گرفته میشوند. برای
UDC 63966 فیلتر بهینه خطی برای نویز غیر سفید G F Savinov در این کار، یک الگوریتم فیلتر بهینه برای مواردی که تأثیرات ورودی و نویزها تصادفی گاوسی هستند به دست میآید.
تعیین حرکات نوسانی عناصر ماهواره ای غیر صلب با استفاده از پردازش تصویر ویدئویی D.O. ناظر علمی موسسه فیزیک و فناوری لازارف مسکو، دکتری: D.S. ایوانف، موسسه
UDC 004 در مورد روشهای ردیابی و ردیابی یک شی در یک جریان ویدیویی در استفاده از سیستم تجزیه و تحلیل ویدیویی برای جمعآوری و تجزیه و تحلیل دادههای بازاریابی Chezganov D.A., Serikov O. ایالت جنوبی روسیه
مجله الکترونیکی "مجموعه مقالات MAI". شماره 66 www.ma.u/scence/tud/ UDC 69.78 الگوریتم ناوبری اصلاح شده برای تعیین موقعیت یک ماهواره مصنوعی با استفاده از سیگنال های GS/GLONASS Kurshin A. V. Moscow Aviation
UDC 621.396.96 مطالعه الگوریتم برای ایجاد و تأیید مسیرها با توجه به معیار M از N Chernova T.S.، دانشجوی بخش "سیستم ها و دستگاه های رادیویی الکترونیکی"، روسیه، 105005، مسکو، MSTU. N.E.
تئوری و تمرین دستگاهها و سیستمهای ناوبری UDC 531.383 تأثیر خطای چرخش پایه روی دقت کالیبراسیون بلوک ژیروسکوپها و شتاب سنجهای ملی V.Tchn
سخنرانی 6 ویژگی های پورتفولیو در سخنرانی های قبلی، به طور مکرر از اصطلاح "پورتفولیو" برای فرمول بندی ریاضی مسئله انتخاب یک نمونه کار بهینه استفاده شد، تعریف دقیقی از آن ضروری است
شناسایی سریهای زمانی با شکافها بر اساس مدلهای فضای ایالتی R. I. Merkulov V. I. Lobach Belarusian State University Minsk Belarus پست الکترونیک: [ایمیل محافظت شده] [ایمیل محافظت شده]
دستگاهها و سیستمهای کنترل خودکار UDC 51971 V N ARSENYEV، A G KOKHANOVSKY، A S FADEYEV MTHEMATICAL MODEL OF CONECTION OF ISOCHRONIC VARIATIONS OF CONTROL SYSTEM STATE WYSTEM VARITERSPARITARS
مجموعه مقالات MAI. شماره 89 UDC 629.051 www.mai.ru/science/trudy/ کالیبراسیون یک سیستم ناوبری اینرسی با سرعت پایین هنگام چرخش حول محور عمودی Matasov A.I.*, Tikhomirov V.V.** Moskovsky
هندسه تحلیلی ماژول 1 جبر ماتریسی جبر برداری متن 4 (مطالعه مستقل) چکیده وابستگی خطی بردارها معیارهای وابستگی خطی بردارهای دو، سه و چهار
UDC 62.396.26 L.A. Podkolzina, K.. Drugov الگوریتم های پردازش اطلاعات در سیستم های ناوبری اجسام متحرک زمین برای کانال تعیین مختصات موقعیت برای تعیین مختصات و پارامترها
تجزیه و تحلیل آماری سریهای زمانی پارامتریک با شکافها بر اساس مدلهای فضای حالت S. V. Lobach دانشگاه دولتی بلاروس مینسک، بلاروس پست الکترونیکی: [ایمیل محافظت شده]
روش های ریاضی برای پردازش داده ها UDC 6.39 S. Ya. Pobeda 37 356 کیف اوکراین موسسه مشکلات ثبت اطلاعات NAS
ساخت استاتیک MM اشیاء تکنولوژیک هنگام مطالعه استاتیک اشیاء تکنولوژیک، اغلب با اشیایی با انواع نمودارهای ساختاری زیر مواجه میشویم (شکل: O با یک ورودی x و یک
برآورد پارامترهای جهت گیری فضاپیما با استفاده از فیلتر کالمن دانشجو، گروه سیستم ها کنترل خودکار": D.I. گالکین ناظر علمی: A.A. کارپونین، دکتری، دانشیار
5. Meleshko V.V. اینرسی استراپ داون سیستم های ناوبری: کتاب درسی. کمک هزینه / V.V. ملشکو، O.I. نسترنکو. Kirovograd: POLYMED-Service, 211. 172 p. دریافت قبل از سردبیر سه ماهه 17 212 roku ÓKostyuk
UDC 004.896 کاربرد تبدیلهای هندسی برای تغییر شکل تصاویر Kanev A.I.، متخصص روسیه، 105005، مسکو، MSTU. N.E. باومن، گروه پردازش اطلاعات و سیستم های مدیریت
4. روش های مونت کارلو 1 4. روش های مونت کارلو برای شبیه سازی اثرات مختلف فیزیکی، اقتصادی و غیره از روش هایی به نام روش های مونت کارلو استفاده زیادی می شود. نام خود را مدیون هستند
فیلتر باند گذر 1 فیلتر باند گذر در قسمت های قبل، فیلتر کردن تغییرات سیگنال سریع (صاف کردن) و تغییرات کند آن (دترندینگ) مورد بحث قرار گرفت. گاهی لازم است برجسته سازی کنید
[یادداشت ها] توضیح مبانی فیلتر کالمن با استفاده از مشتق ساده و شهودی مقاله رمزی فراهر مشتق ساده و شهودی فیلتر کالمن را به منظور آموزش ارائه می کند.
UDC 004.932 الگوریتم طبقه بندی اثر انگشت Lomov D.S., student Russia, 105005, Moscow, MSTU. N.E. باومن، دپارتمان نرم افزار کامپیوتر و فناوری اطلاعات، سرپرست علمی:
سخنرانی ویژگی های عددی یک سیستم از دو متغیر تصادفی - بردار تصادفی بعدی هدف سخنرانی: تعیین ویژگی های عددی یک سیستم از دو متغیر تصادفی: کوواریانس گشتاورهای اولیه و مرکزی
پویایی باروری در جمهوری چوواش مطالب مقدمه 1. روند عمومینرخ زاد و ولد جمهوری چوواش 2. روند اصلی نرخ زاد و ولد 3. پویایی نرخ زاد و ولد در مناطق شهری و روستایی
IN 1990-5548 الکترونیک و سیستم های کنترل. 2011. 4(30) 73 UDC656.7.052.002.5:681.32(045) V. M. Sineglazov، دکترای مهندسی. علوم، پروفسور Sh.I. Askerov پردازش بهینه داده ها در ناوبری
UDC 004.896 ویژگی های اجرای الگوریتم نمایش نتایج آنامورفیک Kanev A.I., Specialist Russia, 105005, Moscow, MSTU. N.E. باومن، گروه سیستم های پردازش اطلاعات و
177 UDC 658.310.8: 519.876.2 استفاده از دقت برآورد در رزرو سنسورها L.I. Luzina مقاله یک رویکرد ممکن برای به دست آوردن یک طرح اضافه کاری حسگر جدید را مورد بحث قرار می دهد. سنتی
مجموعه آثار علمی NSTU. 28.4 (54). 37 44 UDC 59.24 درباره مجموعه ای از برنامه ها برای حل مسئله شناسایی اشیاء ساکن گسسته دینامیک خطی G.V. تروشینا مجموعه ای از برنامه ها در نظر گرفته شد
UDC 625.1:519.222:528.4 S.I. Dolganyuk S.I. Dolganyuk، 2010 افزایش دقت یک راه حل ناوبری هنگام موقعیت یابی لکوموتیوهای SHUNTERING از طریق استفاده از مدل های دیجیتالی توسعه مسیر
UDC 531.1 سازگاری فیلتر KALMAN برای استفاده با سیستم های ناوبری محلی و جهانی A.N. [ایمیل محافظت شده]) V.E. Pavlovsky ( [ایمیل محافظت شده]) موسسه ریاضیات کاربردی به نام.
AUTOMATION AND CONTROL UDC 68.58.3 A. G. Shpektorov, V. T. Fam دانشگاه ایالتی الکتروتکنیکی سنت پترزبورگ "LETI" به نام. V. I. Ulyanova (Lenina) تجزیه و تحلیل استفاده از میکرومکانیکی
مبانی تحلیل رگرسیونی مفهوم همبستگی و تحلیل رگرسیونی برای حل مشکلات تحلیل و پیش بینی اقتصادی، اغلب از داده های آماری، گزارشی یا مشاهده ای استفاده می شود.
سخنرانی 4. حل سیستم معادلات خطی با استفاده از روش تکرار ساده. اگر سیستم دارای ابعاد بزرگ (6 معادله) باشد یا ماتریس سیستم پراکنده باشد، روشهای تکراری غیرمستقیم برای حل موثرتر هستند.
58 کنفرانس علمی MIPT بخش دینامیک و کنترل حرکت فضاپیما سیستم برای تعیین حرکت مدل های سیستم کنترل بر روی میز آیرودینامیک با استفاده از دوربین فیلمبرداری
سخنرانی 3 5. روش های تقریب توابع فرمول بندی مسئله توابع جدولی شبکه [ab] y 5. تعریف شده در گره های شبکه Ω در نظر گرفته می شوند. هر شبکه با مراحل h ناهموار یا h مشخص می شود
1. روش های عددیحل معادلات 1. سیستم های معادلات خطی. 1.1. روش های مستقیم 1.2. روش های تکراری 2. معادلات غیر خطی. 2.1. معادلات با یک مجهول. 2.2. سیستم های معادلات 1.
UDC 621.396 RESEARCH OF ALGORITHMS FOR SECONDARY INFORMATION PROCESSING OF MULTI-POSITION RADAR SYSTEM FOR ELIZATION ANGLE CHANNEL Borisov A.N., Glinchenko V.A., Nazarov A.A.V., Islamov. علمی
موضوع روش های عددی جبر خطی - - موضوع روش های عددی جبر خطی طبقه بندی چهار بخش اصلی جبر خطی وجود دارد: حل سیستم های معادلات جبری خطی (SLAE)
UDC 004.352.242 بازیابی تصاویر تار با حل یک معادله انتگرالی از نوع پیچیدگی Ivannikova I.A., student Russia, 105005, Moscow, MSTU. N.E. باومن، دپارتمان خودکار
نقشه برداری آئروگراویمتری با حالت عملکرد GPS استاندارد Mogilevsky V.E. شرکت تحقیقاتی و تولیدی دولتی JSC Aerogeofizika مهمترین عنصر تعیین کننده موفقیت تحقیقات ژئوفیزیک هوابرد، ناوبری با کیفیت بالا است.
تجزیه و تحلیل سیگنال های صوتی بر اساس روش فیلتراسیون KALMAN I.P. گوروف، پی.جی. ژیگانوف، A.M. Ozersky ویژگی های پردازش دینامیکی سیگنال های تصادفی با استفاده از گسسته
UDC AA Minko شناسایی یک شی خطی با پاسخ به یک سیگنال هارمونیک یک الگوریتم شناسایی تعمیم یافته بر اساس تبدیل گاوسی دو پارامتری یکپارچه یک ثابت خطی پیشنهاد شده است.
سخنرانی. تخمین دامنه سیگنال پیچیده تخمین زمان تاخیر سیگنال تخمین فرکانس یک سیگنال با فاز تصادفی. تخمین مشترک زمان تاخیر و فرکانس یک سیگنال با فاز تصادفی.
فن آوری های محاسباتی جلد 18، 1، 2013 شناسایی پارامترهای فرآیند انتشار غیرعادی بر اساس معادلات تفاوت A. S. Ovsienko Samara State Technical University، روسیه ایمیل:
1 پیش بینی شرایط بازار برای شرکت های پتروشیمی Kordunov D.Yu., Bityutsky S.Ya. مقدمه. در شرایط اقتصادی مدرن، که با توسعه سریع یکپارچگی جهانی مشخص می شود
مشکل محلی سازی و نقشه برداری همزمان (SLAM) Roboschool-2014 Andrey Antonov robotosha.ru 10 اکتبر 2014 طرح 1 مبانی SLAM 2 RGB-D SLAM 3 Robot Andrey Antonov (robotosha.ru) مشکل SLAM
UDC 004.021 T. N. Romanova، A. V. Sidorin، V. N. Solyakov، K. V. Kozlov سنتز تصویر تک رنگ از یک ساخت پالت چند دامنه ای با استفاده از حل معادله پواسون
دانشگاه فنی ملی اوکراین "موسسه پلی تکنیک کیف" گروه ابزار و جهت گیری و سیستم های ناوبری دستورالعمل های کار آزمایشگاهی در رشته "ناوبری"
پردازش سیگنال دیجیتال /9 UDC 69.78 روش تحلیلی برای محاسبه خطاها در تعیین جهت زاویه ای توسط سیگنال های سیستم های ناوبری رادیویی ماهواره ای Aleshechkin A.M. حالت تشخیص مقدمه
ویژگی های تشکیل یک مدل کامپیوتری یک سیستم نوری-الکترونیک دینامیک Pozdnyakova N.S., Torshina I.P. دانشکده اطلاعات نوری دانشگاه دولتی ژئودزی و کارتوگرافی مسکو
مجموعه مقالات ISA RAS 009. T. 46 III. مشکلات کاربردی محاسبات توزیع شده حالت های ساکن در مدل غیرخطی انتقال بار در DNA * حالت های ساکن در مدل غیرخطی انتقال بار در
در فرآیند خودکارسازی فرآیندهای تکنولوژیک برای کنترل مکانیسمها و واحدها، باید با اندازهگیریهای کمیتهای فیزیکی مختلف سر و کار داشت. این می تواند فشار و جریان مایع یا گاز، سرعت چرخش، دما و موارد دیگر باشد. اندازه گیری مقادیر فیزیکی با استفاده از حسگرهای آنالوگ انجام می شود. سیگنال آنالوگ یک سیگنال داده ای است که در آن هر یک از پارامترهای نمایش دهنده با تابعی از زمان و مجموعه ای پیوسته توصیف می شود. مقادیر ممکن. از تداوم فضای مقادیر نتیجه می شود که هر نویز وارد شده به سیگنال از سیگنال مفید قابل تشخیص نیست. بنابراین مقدار نادرست کمیت فیزیکی مورد نیاز در ورودی آنالوگ دستگاه کنترل دریافت می شود. بنابراین، لازم است سیگنال دریافتی از سنسور فیلتر شود.
یکی از الگوریتم های موثر فیلتر، فیلتر کالمن است. فیلتر کالمن یک فیلتر بازگشتی است که بردار حالت یک سیستم دینامیکی را با استفاده از یک سری اندازهگیری ناقص و نویز تخمین میزند. فیلتر کالمن از مدل دینامیکی سیستم (به عنوان مثال قانون فیزیکی حرکت)، اقدامات کنترلی و مجموعه ای از اندازه گیری های متوالیبرای تشکیل یک ارزیابی بهینه از شرایط. الگوریتم از دو مرحله تکراری تشکیل شده است: پیش بینی و تنظیم. در مرحله اول، پیش بینی وضعیت در یک نقطه زمانی بعدی محاسبه می شود (با در نظر گرفتن عدم دقت اندازه گیری آنها). در مورد دوم، اطلاعات جدیداز سنسور مقدار پیش بینی شده را تصحیح می کند (همچنین با در نظر گرفتن عدم دقت و نویز این اطلاعات).
در مرحله پیش بینی:
- پیش بینی وضعیت سیستم:
پیش بینی وضعیت سیستم در زمان فعلی کجاست. - ماتریس انتقال بین حالت ها (مدل پویا سیستم). - پیش بینی وضعیت سیستم در زمان قبلی؛ - ماتریس اعمال کنش کنترلی؛ - کنترل کنش در نقطه قبلی.
- پیش بینی خطای کوواریانس:
پیش بینی خطا کجاست - خطا در نقطه قبلی در زمان؛ - کوواریانس نویز فرآیند.
در مرحله تنظیم:
- محاسبه سود کالمن:

سود کالمن کجاست - ماتریس اندازه گیری که رابطه بین اندازه گیری ها و حالت ها را نشان می دهد. - کوواریانس نویز اندازه گیری
اندازه گیری در زمان فعلی کجاست
- به روز رسانی خطای کوواریانس:
ماتریس هویت کجاست
اگر وضعیت سیستم با یک متغیر توصیف شود، آنگاه = 1، و ماتریس ها به معادلات معمولی تبدیل می شوند.
برای نشان دادن کارایی فیلتر کالمن، آزمایشی با سنسور حجم صدا AVR PIC KY-037 که به میکروکنترلر آردوینو Uno متصل است، انجام شد. شکل 1 نمودار قرائت سنسور را بدون استفاده از فیلتر نشان می دهد (خط 1). نوسانات هرج و مرج در مقدار در خروجی سنسور نشان دهنده وجود نویز است.

شکل 1. نمودار قرائت سنسور بدون اعمال فیلتر
برای اعمال فیلتر، باید مقادیر متغیرها را تعیین کرد، که دینامیک سیستم و اندازهگیریها را تعیین میکنند. بیایید برابر با 1 و برابر 0 بگیریم، زیرا هیچ عملیات کنترلی در سیستم وجود ندارد. برای تعیین خواص صاف کننده فیلتر، باید مقدار متغیر را محاسبه کرد و همچنین مقدار پارامتر را انتخاب کرد.
متغیر را در برنامه محاسبه می کنیم مایکروسافت اکسل 2010. برای انجام این کار، محاسبه انحراف معیار برای نمونه ای از قرائت سنسور ضروری است. = 0.62. بسته به سطح فیلتراسیون مورد نیاز، 0.001 = را انتخاب کنید. در شکل 2، خط دوم نمودار قرائت سنسور با استفاده از فیلتر را نشان می دهد.

شکل 2. نمودار قرائت سنسور با استفاده از فیلتر کالمن.
از نمودار می توان نتیجه گرفت که فیلتر با وظیفه فیلتر کردن تداخل مقابله کرد، زیرا در حالت ثابت، نوسانات در قرائت سنسور فیلتر شده ناچیز است.
با این حال، فیلتر کالمن یک اشکال قابل توجه دارد. اگر کمیتی که توسط یک سنسور اندازه گیری می شود بتواند به سرعت تغییر کند، خوانش سنسور فیلتر شده به سرعت کمیت اندازه گیری شده تغییر نخواهد کرد. شکل 3 پاسخ فیلتر کالمن به جهش در مقدار اندازه گیری شده را نشان می دهد.

شکل 3. پاسخ فیلتر کالمن به جهش در مقدار اندازه گیری شده
پاسخ فیلتر به جهش در مقدار اندازه گیری شده ناچیز بود. اگر مقدار اندازه گیری شده به طور قابل توجهی تغییر کند و سپس به مقدار قبلی برنگردد، خوانش های سنسور فیلتر شده تنها پس از مدت زمان قابل توجهی با مقدار واقعی مقدار اندازه گیری شده مطابقت دارد، که برای سیستم های کنترل خودکار که نیاز به عملکرد بالا دارند غیر قابل قبول است. .
از آزمایش میتوان نتیجه گرفت که استفاده از فیلتر کالمن برای فیلتر کردن قرائت سنسور در سیستمهایی با عملکرد پایین توصیه میشود.
مراجع:
- GOST 17657-79. انتقال داده. اصطلاحات و تعاریف. - مسکو: انتشارات استانداردها، 2005. - 2 ص.
- فیلتر کالمن // ویکی پدیا. . تاریخ به روز رسانی: 1396/04/26. آدرس اینترنتی: http://ru.wikipedia.org/?oldid=85061599 (تاریخ دسترسی: 2017/05/21).
فیلتر کالمن
فیلتر کالمن به طور گسترده در کاربردهای مهندسی و اقتصاد سنجی، از سیستم های رادار و بینایی گرفته تا تخمین پارامترهای مدل های اقتصاد کلان استفاده می شود. فیلتر کالمن است بخش مهمتئوری کنترل نقش زیادی در ایجاد سیستم های کنترل ایفا می کند. فیلتر کالمن همراه با یک کنترلر خطی-مربع به شما اجازه می دهد تا مشکل کنترل گاوسی خطی- درجه دوم را حل کنید. فیلتر کالمن و تنظیم کننده درجه دوم خطی - راه حل ممکناساسی ترین مشکلات در نظریه کنترل
در بیشتر کاربردها، تعداد پارامترهایی که وضعیت یک شی را تعریف می کنند، بیشتر از تعداد پارامترهای قابل مشاهده در دسترس برای اندازه گیری است. فیلتر کالمن با استفاده از مدلی از یک شی بر اساس تعدادی از اندازه گیری های موجود، به فرد اجازه می دهد تا تخمینی از وضعیت داخلی به دست آورد.
فیلتر کالمن برای تخمین بازگشتی بردار حالت یک سیستم دینامیکی شناخته شده پیشینی طراحی شده است، یعنی برای محاسبه وضعیت فعلی سیستم، لازم است اندازه گیری جریان و همچنین وضعیت قبلی خود فیلتر را بدانید. . بنابراین، فیلتر کالمن، مانند بسیاری از فیلترهای بازگشتی دیگر، به جای نمایش فرکانس، در یک زمان اجرا می شود.
یک مثال واضح از قابلیتهای فیلتر، بدست آوردن تخمینهای دقیق و بهروز شده از موقعیت و سرعت برخی شیها بر اساس نتایج یک سری زمانی از اندازهگیریهای نادرست مکان آن است. به عنوان مثال، در رادار وظیفه ردیابی یک هدف، تعیین مکان، سرعت و شتاب آن است، در حالی که نتایج اندازه گیری به تدریج می رسد و بسیار پر سر و صدا هستند. فیلتر کالمن از یک مدل احتمالی از دینامیک هدف استفاده می کند که نوع حرکت احتمالی جسم را مشخص می کند، که تاثیر نویز را کاهش می دهد و تخمین های خوبی از موقعیت جسم در زمان حال، آینده یا گذشته ارائه می دهد.
مقدمه
فیلتر کالمن با مفهوم بردار حالت سیستم (مجموعه ای از پارامترها که وضعیت سیستم را در یک نقطه زمانی خاص توصیف می کند) و توصیف آماری آن عمل می کند. در حالت کلی، دینامیک یک بردار حالت خاص با چگالی احتمال توزیع اجزای آن در هر لحظه از زمان توصیف میشود. اگر یک مدل ریاضی خاصی از مشاهدات سیستم و همچنین مدلی از تغییر پیشینی در پارامترهای بردار حالت (یعنی به عنوان فرآیند شکلگیری مارکوف) دارید، میتوانید معادلهای برای چگالی احتمال خلفی بنویسید. بردار حالت در هر زمان این معادله دیفرانسیل را معادله استراتونوویچ می نامند. معادله استراتونوویچ را نمی توان به شکل کلی آن حل کرد. یک راه حل تحلیلی را می توان تنها در مورد تعدادی از محدودیت ها (فرض ها) به دست آورد:
- گوسی چگالی احتمال پیشینی و خلفی بردار حالت در هر زمان (از جمله اولیه)
- گاوسی بودن شکل دهی نویز
- گاوسی بودن نویز مشاهده
- سفیدی نویز مشاهده
- خطی بودن مدل مشاهده
- خطی بودن مدل فرآیند شکل دهی (که به یاد بیاورید، باید یک فرآیند مارکوف باشد)
فیلتر کالمن کلاسیک معادله ای برای محاسبه لحظه های اول و دوم چگالی احتمال خلفی (به مفهوم بردار انتظارات ریاضی و ماتریسی از واریانس ها، از جمله واریانس های متقابل) تحت محدودیت های داده شده است. با توجه به اینکه برای چگالی احتمال نرمال انتظارات ریاضی و ماتریس پراکندگی چگالی احتمال را به طور کامل تعریف می کنند، می توان گفت که فیلتر کالمن چگالی احتمال خلفی بردار حالت را در هر نقطه از زمان محاسبه می کند. این بدان معنی است که بردار حالت را کاملاً به عنوان یک کمیت برداری تصادفی توصیف می کند.
مقادیر محاسبه شده انتظارات ریاضی در این مورد برآوردهای بهینه با توجه به معیار خطای ریشه میانگین مربع است که استفاده گسترده از آن را تعیین می کند.
انواع مختلفی از فیلتر کالمن وجود دارد که از نظر تقریبی و ترفندهایی متفاوت هستند که باید برای کاهش فیلتر به شکل توصیف شده و کاهش ابعاد آن استفاده شود:
- فیلتر کالمن توسعه یافته (EKF). کاهش مدلهای مشاهدهای غیرخطی و فرآیند شکلدهی با استفاده از خطیسازی از طریق بسط سری تیلور.
- فیلتر کالمن بدون بو (UKF). در مسائلی استفاده می شود که در آنها خطی سازی ساده منجر به تخریب می شود اتصالات مفیدبین اجزای بردار حالت. در این مورد، «خطیسازی» مبتنی بر دگرگونی بدون بو است.
- فیلتر کالمن مجموعه (EnKF). برای کاهش ابعاد یک مشکل استفاده می شود.
- گزینه ها با یک فیلتر اضافی غیرخطی امکان پذیر است، که این امکان را فراهم می کند تا مشاهدات غیر گاوسی را به مشاهدات عادی کاهش دهید.
- گزینه هایی با فیلتر "سفید کننده" امکان پذیر است که به شما امکان می دهد با نویز "رنگی" کار کنید
- و غیره
مدل سیستم پویا استفاده شده است
فیلترهای کالمن بر اساس سیستمهای دینامیکی خطی نمونهبرداری شده زمانی هستند. چنین سیستمهایی توسط زنجیرههای مارکوف با استفاده از عملگرهای خطی و اصطلاحات با توزیع نرمال مدلسازی میشوند. وضعیت سیستم توسط بردار بعد محدود - بردار حالت - توصیف می شود. در هر مرحله زمانی، یک عملگر خطی روی بردار حالت عمل می کند و آن را به بردار حالت دیگری منتقل می کند (تغییر قطعی در حالت)، یک بردار مشخص از نویز معمولی (عوامل تصادفی) اضافه می شود و در حالت کلی، یک بردار کنترلی که تاثیر سیستم کنترل را مدل می کند. فیلتر کالمن را میتوان مشابه مدلهای مارکوف پنهان مشاهده کرد، با این تفاوت که متغیرهای توصیفکننده وضعیت سیستم، عناصر یک مجموعه نامتناهی از اعداد واقعی هستند (در مقابل مجموعهای از فضای حالت محدود در مدلهای مارکوف پنهان). علاوه بر این، مدلهای پنهان مارکوف میتوانند از توزیعهای دلخواه برای مقادیر بردار حالت بعدی استفاده کنند، برخلاف فیلتر کالمن، که از یک مدل نویز معمولی توزیع شده استفاده میکند. رابطه دقیقی بین معادلات فیلتر کالمن و مدل پنهانمارکوا. مروری بر این مدل ها و مدل های دیگر توسط روئیس و چهارمانی (1999) ارائه شده است.
هنگام استفاده از فیلتر کالمن برای به دست آوردن تخمین های بردار حالت فرآیند از یک سری اندازه گیری های پر سر و صدا، لازم است یک مدل ارائه شود. این فرآیندمطابق با ساختار فیلتر - به شکل یک معادله ماتریسی از یک نوع خاص. برای هر ضربه کعملکرد فیلتر، لازم است ماتریس ها را مطابق با توضیحات زیر تعیین کنید: تکامل فرآیند اف ک; ماتریس مشاهده اچ ک; ماتریس کوواریانس فرآیند س ک; ماتریس کوواریانس نویز اندازه گیری آر ک; در حضور اقدامات کنترلی - ماتریسی از ضرایب آنها ب ک .
تصویری از نحوه عملکرد فیلتر. ماتریس ها با مربع مشخص می شوند. بیضی ها ماتریس های توزیع نرمال چند متغیره (شامل میانگین ها و کوواریانس ها) را نشان می دهند. بردارها بدون دایره رها می شوند. در ساده ترین حالت، برخی از ماتریس ها در طول زمان تغییر نمی کنند (به شاخص بستگی ندارند ک، اما همچنان توسط فیلتر در هر چرخه عملیات استفاده می شود.
مدل سیستم/فرآیند حالت واقعی را در آن زمان فرض می کند کاز حالت واقعی در حال حاضر بدست می آید ک−1 با توجه به معادله:
,- اف ک- ماتریس تکامل فرآیند/سیستم که بر بردار را تحت تأثیر قرار می دهد x ک−1 (بردار حالت در حال حاضر ک−1 );
- ب ک- ماتریس کنترل که بر بردار اقدامات کنترلی اعمال می شود تو ک ;
- w ک- فرآیند تصادفی عادی با انتظارات ریاضی صفر و ماتریس کوواریانس س ک، که ماهیت تصادفی تکامل سیستم/فرآیند را توصیف می کند:
در حال حاضر کمشاهده (اندازه گیری) انجام می شود z کبردار حالت واقعی x ک، که با معادله به یکدیگر مرتبط هستند:
کجا اچ ک- ماتریس اندازه گیری که بردار حالت واقعی و بردار اندازه گیری های گرفته شده را به هم متصل می کند. v ک- نویز گاوسی سفید اندازه گیری با انتظارات ریاضی صفر و ماتریس کوواریانس آر ک :
حالت اولیه و بردارهای فرآیندهای تصادفی در هر سیکل ساعت ( x 0 , w 1 , …, w ک , v 1 , …, v ک) مستقل در نظر گرفته می شوند.
بسیاری از سیستم های دینامیکی واقعی را نمی توان با این مدل به طور دقیق توصیف کرد. در عمل، دینامیک در نظر گرفته نشده در مدل می تواند به طور جدی عملکرد فیلتر را خراب کند، به خصوص هنگام کار با یک سیگنال ورودی تصادفی ناشناخته. علاوه بر این، دینامیک در نظر گرفته نشده در مدل می تواند فیلتر را ناپایدار کند. از طرف دیگر، نویز سفید مستقل به عنوان یک سیگنال باعث واگرایی الگوریتم نخواهد شد. مشکل جداسازی نویز اندازه گیری از دینامیک که در مدل در نظر گرفته نشده است، با استفاده از تئوری سیستم های کنترل قوی حل شده است.
فیلتر کالمن
فیلتر کالمن نوعی فیلتر بازگشتی است. برای محاسبه ارزیابی وضعیت سیستم برای چرخه فعلی عملیات، نیاز به ارزیابی وضعیت (در قالب ارزیابی وضعیت سیستم و برآورد خطا در تعیین این حالت) در چرخه قبلی عملیات و اندازه گیری در چرخه فعلی. این ویژگی آن را از فیلترهای بسته متمایز می کند که به دانش تاریخچه اندازه گیری ها و/یا تخمین ها در طول چرخه فعلی عملیات نیاز دارند. در زیر، با نمادگذاری، تخمین بردار واقعی را در لحظه خواهیم فهمید nبا در نظر گرفتن اندازه گیری ها از لحظه شروع کار تا زمان مترفراگیر
وضعیت فیلتر توسط دو متغیر مشخص می شود:
تکرار فیلتر کالمن به دو مرحله تقسیم می شود: برون یابی و تصحیح. در طول برون یابی، فیلتر دریافت می کند ارزیابی اولیهوضعیت سیستم (در ادبیات روسی زبان اغلب به آن اشاره می شود، جایی که به معنای "برون یابی" است، و ک- تعداد چرخه ساعتی که در آن دریافت شد) برای مرحله فعلی بر اساس ارزیابی نهایی وضعیت از مرحله قبل (یا برآورد اولیه برای چرخه ساعت بعدی بر اساس ارزیابی نهایی مرحله فعلی، بسته به تفسیر). این تخمین اولیه تخمین پیشینی وضعیت نیز نامیده می شود، زیرا از مشاهدات مرحله مربوطه برای به دست آوردن آن استفاده نمی کند. در مرحله تصحیح، برون یابی پیشینی با اندازه گیری های جاری مربوطه تکمیل می شود تا برآورد را تصحیح کند. تخمین تعدیل شده را تخمین حالت پسین یا به سادگی تخمین بردار حالت نیز می نامند. به طور معمول، این دو مرحله متناوب می شوند: برون یابی بر اساس نتایج تصحیح تا مشاهده بعدی انجام می شود، و تصحیح همراه با مشاهدات موجود در مرحله بعدی و غیره انجام می شود. با این حال، توسعه دیگری از رویدادها ممکن است، اگر برای مشاهده به دلایلی مشخص شد که مشاهده در دسترس نیست، سپس مرحله تصحیح ممکن است نادیده گرفته شود و از برآورد تعدیل نشده (برون یابی پیشینی) برون یابی شود. به همین ترتیب، اگر اندازهگیریهای مستقل فقط در چرخههای کاری خاص در دسترس باشند، اصلاحات همچنان ممکن است (معمولاً با استفاده از یک ماتریس مشاهده متفاوت اچ ک ).
مرحله برون یابی
مرحله تصحیح
| انحراف دریافت شده در مرحله کمشاهدات از مشاهده مورد انتظار از برون یابی: | |
| ماتریس کوواریانس برای بردار انحراف (بردار خطا): | |
| ماتریس بهره بهینه کالمن که بر اساس ماتریس های کوواریانس برون یابی موجود بردار حالت و اندازه گیری های به دست آمده (از طریق ماتریس کوواریانس بردار انحراف) تشکیل شده است: | |
| تصحیح برون یابی قبلی به دست آمده از بردار حالت - به دست آوردن تخمینی از بردار حالت سیستم: | |
| محاسبه ماتریس کوواریانس برای تخمین بردار حالت سیستم: |
بیان ماتریس کوواریانس تخمین بردار حالت سیستم تنها زمانی معتبر است که از بردار بهینه داده شده ضرایب استفاده شود. به طور کلی این عبارت شکل پیچیده تری دارد.
متغیرها
اگر مدل کاملاً دقیق و کاملاً دقیق مشخص شده باشد شرایط اولیهو سپس مقادیر زیر پس از هر تعداد تکرار فیلتر حفظ می شوند - آنها ثابت هستند:
انتظارات ریاضی تخمین ها و برون یابی های بردار حالت سیستم و ماتریس های خطا بردارهای صفر هستند:
انتظار ریاضی کجاست
ماتریسهای کوواریانس محاسبهشده برونیابیها، برآوردهای حالت سیستم و بردارهای خطا با ماتریسهای کوواریانس واقعی منطبق هستند:
نمونه ای از ساخت فیلتر
بیایید یک چرخ دستی را تصور کنیم که در غیاب اصطکاک روی ریل های بی نهایت طولانی ایستاده است. در ابتدا در موقعیت 0 در حالت سکون است، اما تحت تأثیر عوامل تصادفی در معرض شتاب تصادفی قرار می گیرد. موقعیت چرخ دستی را هر ∆ اندازه می گیریم تیثانیه، اما اندازه گیری ها دقیق نیستند. ما می خواهیم تخمین هایی از موقعیت چرخ دستی و سرعت آن به دست آوریم. بیایید فیلتر کالمن را برای این مشکل اعمال کنیم و تمام ماتریس های لازم را تعیین کنیم.
در این مسئله ماتریس ها اف , اچ , آرو سبه زمان بستگی ندارد، ما شاخص های آنها را حذف می کنیم. علاوه بر این، ما چرخ دستی را کنترل نمی کنیم، بنابراین ماتریس کنترل بغایب
مختصات و سرعت چرخ دستی توسط بردار در توضیح داده شده است فضای خطیایالت ها
سرعت کجاست (نخستین مشتق مختصات نسبت به زمان).
فرض می کنیم که بین ( ک−1)ام و کدر سیکل هفتم چرخ دستی با شتاب ثابت حرکت می کند یک ک، بر اساس قانون نرمال با انتظارات ریاضی صفر و انحراف معیار توزیع شده است σ a. بر اساس مکانیک نیوتنی، ما می توانیم بنویسیم
.ماتریس کوواریانس اثرات تصادفی
(σ الف- اسکالر).در هر مرحله از کار، موقعیت چرخ دستی اندازه گیری می شود. فرض کنید که خطای اندازه گیری است vkدارای توزیع نرمال با انتظارات ریاضی صفر و انحراف معیار است σ z. سپس
و ماتریس کوواریانس نویز مشاهده به شکل است
.موقعیت اولیه چرخ دستی دقیقا مشخص است
, .اگر موقعیت و سرعت چرخ دستی فقط به طور تقریبی شناخته شده باشد، ماتریس واریانس را می توان با یک عدد به اندازه کافی مقداردهی اولیه کرد. L، به طوری که عدد از واریانس اندازه گیری مختصات بیشتر شود
, .در این حالت فیلتر در اولین سیکل های عملیاتی از نتایج اندازه گیری با وزن بیشتری نسبت به اطلاعات قبلی موجود استفاده می کند.
استخراج فرمول ها
ماتریس کوواریانس تخمین بردار حالت
با تعریف ماتریس کوواریانس پ ک|ک
برای تخمین بردار حالت، عبارت را جایگزین کنید
و عبارت بردار خطا را بنویسید
و بردارهای اندازه گیری
بردار خطای اندازه گیری را خارج می کنیم v ک
از بردار خطای اندازه گیری v کبا استدلال های دیگر همبستگی ندارد، ما عبارت را دریافت می کنیم
مطابق با ویژگی های کوواریانس برداری، این عبارت به شکل تبدیل می شود
جایگزینی عبارت برای ماتریس کوواریانس برونیابی بردار حالت با پ ک|ک−1 و تعیین ماتریس کوواریانس نویز مشاهده در آر ک، دریافت می کنیم
عبارت حاصل برای یک ماتریس ضریب دلخواه معتبر است، اما اگر یک ماتریس ضریب بهینه کالمن باشد، این عبارت برای ماتریس کوواریانس می تواند ساده شود.
ماتریس سود بهینه
فیلتر کالمن مجموع مربعات انتظارات ریاضی خطاهای تخمین بردار حالت را به حداقل می رساند.
بردار خطای تخمین بردار حالت
وظیفه به حداقل رساندن مجموع انتظارات ریاضی مربعات اجزای یک بردار معین است.
,که معادل به حداقل رساندن رد ماتریس کوواریانس تخمین بردار حالت است پ ک|ک. اجازه دهید عبارات موجود را در عبارت ماتریس کوواریانس تخمین بردار حالت جایگزین کرده و آن را به مربع کامل کامل کنیم:
توجه داشته باشید که جمله آخر ماتریس کوواریانس برخی از متغیرهای تصادفی است، بنابراین ردیابی آن غیر منفی است. حداقل ردیابی زمانی حاصل می شود که آخرین جمله روی صفر تنظیم شود:
استدلال می شود که این ماتریس مطلوب است و هنگامی که به عنوان ماتریس ضرایب در فیلتر کالمن استفاده می شود، مجموع میانگین مربعات خطاها را در تخمین بردار حالت به حداقل می رساند.
ماتریس کوواریانس تخمین بردار حالت با استفاده از ماتریس ضریب بهینه
بیان ماتریس کوواریانس تخمین بردار حالت پ ک|کهنگام استفاده از ماتریس ضریب بهینه به شکل زیر خواهد بود:
این فرمول از نظر محاسباتی سادهتر است و بنابراین تقریباً همیشه در عمل استفاده میشود، اما تنها در صورت استفاده از ماتریس ضریب بهینه صحیح است. اگر به دلیل دقت محاسباتی کم، مشکلی در پایداری محاسباتی ایجاد شود، یا از ماتریس ضرایبی غیر از بهینه به طور خاص استفاده شود، باید از یک فرمول کلی برای ماتریس کوواریانس تخمین بردار حالت استفاده شود.
فیلتر کالمن احتمالاً محبوب ترین الگوریتم فیلتری است که در بسیاری از زمینه های علم و فناوری استفاده می شود. به دلیل سادگی و کارایی می توان آن را در گیرنده های GPS، پردازشگرهای داده حسگر، در اجرای سیستم های کنترلی و ... یافت.
مقالات و کتاب های زیادی در اینترنت در مورد فیلتر کالمن وجود دارد (بیشتر به زبان انگلیسی)، اما این مقالات دارای موانع نسبتاً بالایی برای ورود هستند، اگرچه در واقع این یک الگوریتم بسیار واضح و شفاف است . من سعی خواهم کرد در مورد آن به شما بگویم به زبان ساده، با افزایش تدریجی پیچیدگی.
برای چیست؟
هر ابزار اندازه گیری دارای مقداری خطا است و ممکن است تحت تأثیر قرار گیرد تعداد زیادیتأثیرات بیرونی و داخلی، که منجر به نویز بودن اطلاعات آن می شود. هر چه داده ها پر سر و صداتر باشند، پردازش چنین اطلاعاتی دشوارتر می شود.فیلتر یک الگوریتم پردازش داده است که نویز و اطلاعات غیر ضروری. در فیلتر کالمن می توان اطلاعات پیشینی در مورد ماهیت سیستم، رابطه متغیرها مشخص کرد و بر اساس آن تخمین دقیق تری ساخت، اما حتی در ساده ترین حالت (بدون درج اطلاعات پیشینی) می دهد. نتایج عالی
در نظر بگیریم ساده ترین مثال- فرض کنید باید سطح سوخت باک را کنترل کنیم. برای انجام این کار ، یک سنسور خازنی در مخزن نصب شده است ، نگهداری از آن بسیار آسان است ، اما دارای معایبی است - به عنوان مثال ، وابستگی به سوخت پر شده (ثابت دی الکتریک سوخت به عوامل زیادی بستگی دارد ، به عنوان مثال ، دما. ) و تأثیر بزرگ "بطری" در مخزن. در نتیجه، اطلاعات حاصل از آن نشان دهنده یک "اره" معمولی با دامنه مناسب است. این نوع سنسورها اغلب بر روی تجهیزات معدنی سنگین نصب می شوند (با حجم مخزن اشتباه نگیرید):
فیلتر کالمن
بیایید کمی منحرف شویم و با خود الگوریتم آشنا شویم. فیلتر کالمن از یک مدل دینامیکی سیستم (به عنوان مثال، قانون فیزیکی حرکت)، ورودی های کنترل شناخته شده و اندازه گیری های متوالی متعدد برای تشکیل یک تخمین حالت بهینه استفاده می کند. الگوریتم از دو مرحله تکراری تشکیل شده است: پیش بینی و تنظیم. در مرحله اول، پیش بینی وضعیت در لحظه بعدی محاسبه می شود (با در نظر گرفتن عدم دقت اندازه گیری آنها). در مرحله دوم، اطلاعات جدید از سنسور مقدار پیش بینی شده را تصحیح می کند (همچنین با در نظر گرفتن عدم دقت و نویز این اطلاعات):معادلات به صورت ماتریسی ارائه میشوند، اگر جبر خطی را نمیدانید، اشکالی ندارد، آنچه در ادامه میآید یک نسخه ساده شده بدون ماتریس برای مورد با یک متغیر است. در مورد یک متغیر، ماتریس ها به مقادیر اسکالر تبدیل می شوند.
بیایید ابتدا نماد را درک کنیم: زیرنویس یک لحظه در زمان را نشان می دهد: k - فعلی، (k-1) - قبلی، علامت منفی در بالانویس نشان می دهد که این پیش بینی کردمقدار متوسط
توضیحات متغیرها در تصاویر زیر ارائه شده است:
شما می توانید برای مدت طولانی و خسته کننده توصیف کنید که همه این ماتریس های انتقال مرموز به چه معنا هستند، اما به نظر من بهتر است مثال واقعیسعی کنید الگوریتمی را اعمال کنید تا معانی انتزاعی معنای واقعی پیدا کنند.
بیایید آن را در عمل امتحان کنیم
بیایید به مثال با سنسور سطح سوخت برگردیم، از آنجایی که وضعیت سیستم با یک متغیر نشان داده می شود (حجم سوخت در مخزن)، ماتریس ها به معادلات معمولی تبدیل می شوند:تعریف مدل فرآیند
برای اعمال فیلتر، لازم است ماتریس ها/مقدارهای متغیرهایی که دینامیک سیستم و ابعاد F، B و H را تعیین می کنند، تعیین کنیم:اف- متغیری که دینامیک سیستم را توصیف می کند، در مورد سوخت - این می تواند ضریبی باشد که مصرف سوخت را در حالت آماده به کار در طول زمان نمونه برداری (زمان بین مراحل الگوریتم) تعیین می کند. اما علاوه بر مصرف سوخت، پمپ بنزین ها نیز وجود دارد... پس برای سادگی، این متغیر را 1 قرار می دهیم (یعنی نشان می دهیم که مقدار پیش بینی شده برابر با حالت قبلی خواهد بود).
ب- متغیری که کاربرد عمل کنترل را تعیین می کند. اگر اطلاعات بیشتری در مورد دور موتور یا درجه فشار روی پدال گاز داشتیم، این پارامتر تعیین میکرد که مصرف سوخت در طول دوره نمونهبرداری چگونه تغییر میکند. از آنجایی که هیچ اقدام کنترلی در مدل ما وجود ندارد (اطلاعاتی در مورد آنها وجود ندارد)، B = 0 را می پذیریم.
اچ- ماتریسی که رابطه بین اندازه گیری ها و وضعیت سیستم را تعریف می کند، در حال حاضر بدون توضیح، این متغیر را نیز برابر با 1 می پذیریم.
تعریف خواص صاف کنندگی
آر- خطای اندازه گیری را می توان با آزمایش وسایل اندازه گیری و تعیین خطای اندازه گیری آنها تعیین کرد.س- تعیین نویز فرآیند کار دشوارتری است، زیرا تعیین واریانس فرآیند ضروری است، که همیشه ممکن نیست. در هر صورت می توانید این پارامتر را انتخاب کنید تا سطح فیلتراسیون مورد نیاز را فراهم کنید.
بیایید آن را در کد پیاده سازی کنیم
برای رفع سردرگمی باقی مانده، بیایید یک الگوریتم ساده شده در سی شارپ (بدون ماتریس و اقدامات کنترلی) پیاده سازی کنیم:کلاس KalmanFilterSimple1D
{
دو برابر عمومی X0 (دریافت؛ مجموعه خصوصی؛) // حالت پیش بینی شده
دو برابر عمومی P0 ( دریافت؛ مجموعه خصوصی؛ ) // کوواریانس پیش بینی شده
دو برابر عمومی F ( دریافت؛ مجموعه خصوصی؛ ) // ضریب مقدار واقعی به مقدار واقعی قبلی
public double Q ( دریافت؛ مجموعه خصوصی؛ ) // نویز اندازه گیری
دو برابر عمومی H ( دریافت؛ مجموعه خصوصی؛ ) // ضریب مقدار اندازه گیری شده به مقدار واقعی
public double R ( دریافت؛ مجموعه خصوصی؛ ) // نویز محیط
حالت دوگانه عمومی (دریافت؛ مجموعه خصوصی؛ )
کوواریانس دوگانه عمومی (دریافت؛ مجموعه خصوصی؛ )
عمومی KalmanFilterSimple1D(q دو برابر، دو برابر، f = 1، دو برابر h = 1)
{
Q = q;
R = r;
F = f;
H = h;
}
SetState void عمومی (وضعیت دوگانه، کوواریانس دوگانه)
{
ایالت = ایالت;
کوواریانس = کوواریانس;
}
Public Void Correct (داده مضاعف)
{
//زمان به روز رسانی - پیش بینی
X0 = F*State;
P0 = F * کوواریانس * F + Q;
//به روز رسانی اندازه گیری - تصحیح
var K = H*P0/(H*P0*H + R);
حالت = X0 + K * (داده - H * X0)؛
کوواریانس = (1 - K*H)*F;
}
}
// برنامه ...
Var fuelData = GetData();
var filtered = new List();
Var kalman = جدید KalmanFilterSimple1D(f: 1, h: 1, q: 2, r: 15); // مجموعه F، H، Q و R
kalman.SetState(fuelData, 0.1); // مقادیر اولیه State و Covariance را تنظیم کنید
foreach (var d در سوخت دیتا)
{
kalman.Correct(d); // الگوریتم را اعمال کنید
Filtered.Add(kalman.State); // ذخیره کنید وضعیت فعلی
}
نتیجه فیلتر کردن با این پارامترها در شکل نشان داده شده است (برای تنظیم درجه هموارسازی، می توانید پارامترهای Q و R را تغییر دهید):
جالب ترین بخش خارج از محدوده مقاله باقی می ماند - اعمال فیلتر Kalman برای چندین متغیر، مشخص کردن رابطه بین آنها و خروجی خودکار مقادیر برای متغیرهای مشاهده نشده. سعی می کنم به محض اینکه فرصت کردم موضوع را ادامه دهم.
امیدوارم توضیحات خیلی خسته کننده و پیچیده نبوده باشد، اگر سوال یا توضیحی دارید، به نظرات خوش آمدید)
Random Forest یکی از الگوریتم های داده کاوی مورد علاقه من است. اولاً، می توان از آن برای حل مشکلات رگرسیون و طبقه بندی استفاده کرد. جستجو برای ناهنجاری ها و انتخاب پیش بینی کننده ها. ثانیاً، این یک الگوریتم است که اعمال نادرست آن واقعاً دشوار است. صرفاً به این دلیل که برخلاف سایر الگوریتمها، پارامترهای قابل تنظیم کمی دارد. و همچنین ماهیت آن به طرز شگفت آوری ساده است. و در عین حال دقت شگفت انگیزی دارد.
ایده پشت چنین الگوریتم شگفت انگیزی چیست؟ ایده ساده است: فرض کنید الگوریتم بسیار ضعیفی داریم. اگر خیلی کار کنیم مدل های مختلفبا استفاده از این الگوریتم ضعیف و میانگین گیری نتیجه پیش بینی های آنها، نتیجه نهایی به میزان قابل توجهی بهتر خواهد بود. این همان چیزی است که به آن یادگیری گروهی در عمل می گویند. به همین دلیل است که الگوریتم Random Forest برای داده های دریافتی "جنگل تصادفی" نامیده می شود، درخت های تصمیم گیری زیادی ایجاد می کند و سپس نتیجه پیش بینی های آنها را میانگین می کند. یک نکته مهمدر ایجاد هر درخت یک عنصر شانس وجود دارد. به هر حال، واضح است که اگر تعداد زیادی درخت یکسان ایجاد کنیم، نتیجه میانگین گیری آنها دقت یک درخت را خواهد داشت.
چگونه کار می کند؟ بیایید فرض کنیم مقداری داده ورودی داریم. هر ستون مربوط به برخی از پارامترها، هر ردیف مربوط به برخی از عناصر داده است.
میتوانیم بهطور تصادفی تعداد مشخصی از ستونها و ردیفها را از کل مجموعه داده انتخاب کنیم و بر اساس آنها یک درخت تصمیم بسازیم.

پنجشنبه 10 می 2012
پنجشنبه 12 ژانویه 2012

همین. پرواز 17 ساعته تمام شد، روسیه در خارج از کشور باقی می ماند. و از پنجره یک آپارتمان 2 خوابه دنج، سانفرانسیسکو، دره معروف سیلیکون، کالیفرنیا، ایالات متحده آمریکا، به ما نگاه می کند. بله، این دقیقاً دلیلی است که اخیراً زیاد ننوشته ام. ما نقل مکان کرده ایم.
همه اینها در آوریل 2011 زمانی که من یک مصاحبه تلفنی با Zynga داشتم شروع شد. سپس همه چیز شبیه نوعی بازی بی ارتباط با واقعیت به نظر می رسید و من حتی نمی توانستم تصور کنم که به چه چیزی منجر می شود. در ژوئن 2011، زینگا به مسکو آمد و یک سری مصاحبه انجام داد، حدود 60 کاندیدایی که مصاحبه تلفنی را پشت سر گذاشتند در نظر گرفته شدند و حدود 15 نفر از بین آنها انتخاب شدند (تعداد دقیق را نمی دانم، برخی بعدا نظر خود را تغییر دادند، برخی دیگر تغییر کردند. بلافاصله امتناع کرد). مصاحبه به طرز شگفت آوری ساده بود. بدون مشکل برنامه نویسی، بدون سؤال پیچیده در مورد شکل دریچه ها، عمدتاً توانایی شما برای چت را آزمایش می کند. و دانش، به نظر من، فقط به صورت سطحی ارزیابی شد.
و سپس دزدی شروع شد. ابتدا منتظر نتایج بودیم، سپس پیشنهاد، سپس تأیید LCA، سپس تأیید دادخواست ویزا، سپس مدارک از ایالات متحده، سپس صف سفارت، سپس تأیید اضافی، سپس ویزا. گاهی به نظرم رسید که حاضرم همه چیز را رها کنم و گل بزنم. گاهی شک داشتم که آیا ما به این آمریکا نیاز داریم، بالاخره روسیه هم بد نیست. کل این پروسه حدود شش ماه به طول انجامید و در نهایت در اواسط دسامبر، ویزا دریافت کردیم و شروع به آماده سازی برای خروج کردیم.
دوشنبه اولین روز کاری من در یک مکان جدید بود. این دفتر همه شرایط را برای نه تنها کار، بلکه برای زندگی دارد. صبحانه، ناهار و شام از سرآشپزهای خودمان، غذاهای متنوع پر شده در هر گوشه، سالن بدنسازی، ماساژ و حتی آرایشگاه. همه اینها برای کارمندان کاملا رایگان است. بسیاری از مردم با دوچرخه به محل کار خود رفت و آمد می کنند و چندین اتاق برای نگهداری وسایل نقلیه مجهز شده است. به طور کلی، من هرگز چنین چیزی را در روسیه ندیده ام. با این حال، همه چیز بهای خود را دارد. این که «خیلی» چیست، با معیارهای آنها، برای من خیلی روشن نیست.
با این حال، امیدوارم که علیرغم حجم زیاد کار، در آینده ای قابل پیش بینی بتوانم وبلاگ نویسی را از سر بگیرم و شاید در مورد زندگی آمریکایی و کار به عنوان برنامه نویس در آمریکا چیزی بگویم. صبر کن ببین در ضمن، سال نو و کریسمس را به همه تبریک می گویم و دوباره شما را می بینم!
برای مثالی از استفاده، بیایید بازده سود سهام را چاپ کنیم شرکت های روسی. به عنوان قیمت پایه، قیمت پایانی سهم را در روز بسته شدن ثبت در نظر می گیریم. به دلایلی، این اطلاعات در وب سایت Troika در دسترس نیست، اما بسیار جالب تر از مقادیر مطلق سود سهام است.
توجه! اجرای کد به زمان زیادی نیاز دارد، زیرا ... برای هر تبلیغ باید یک درخواست به سرورهای فینام بدهید و ارزش آن را دریافت کنید.
نتیجه<- NULL for(i in (1:length(divs[,1]))){ d <- divs if (d$Divs>0) (امتحان (( نقل قول<- getSymbols(d$Symbol, src="Finam", from="2010-01-01", auto.assign=FALSE) if (!is.nan(quotes)){ price <- Cl(quotes) if (length(price)>0) (dd<- d$Divs result <- rbind(result, data.frame(d$Symbol, d$Name, d$RegistryDate, as.numeric(dd)/as.numeric(price), stringsAsFactors=FALSE)) } } }, silent=TRUE) } } colnames(result) <- c("Symbol", "Name", "RegistryDate", "Divs") result

به طور مشابه، می توانید آمار سال های گذشته را بسازید.