Bezpečnostný informačný portál. Použitie Kalmanovho filtra na filtrovanie hodnôt zo senzorov Kalmanov filter pre nelineárne systémy
Prepis
1 # 09, september 2015 MDT Aplikácia Kalmanovho filtra na spracovanie sekvencie GPS súradníc Listerenko R.R., bakalár Rusko, Moskva, MSTU. N.E. Bauman, Katedra počítačového softvéru a informačné technológie» Vedecký vedúci: Bekasov D.E., asistent Rusko, Moskva, MSTU pomenovaná po. N.E. Bauman, Katedra počítačového softvéru a informačných technológií Úloha filtrovania GPS súradníc V súčasnosti sú široko využívané služby GPS sledovania, ktorých úlohou je sledovať trasy pozorovaných objektov za účelom ich uloženia a ďalšej reprodukcie a analýzy. Avšak v dôsledku chyby snímača GPS z viacerých dôvodov, ako je strata signálu zo satelitu, zmeny geometrie satelitu, odraz signálu, chyby vo výpočte a chyby zaokrúhľovania, konečný výsledok presne nezodpovedá trase objektu. Existujú ako malé odchýlky (do 100 m), ktoré nebránia vnímaniu vizuálnych informácií o trase a jej analýze, tak veľmi významné odchýlky (do 1 km, v prípade straty satelitného signálu a použitia základňové stanice až niekoľko desiatok km). Na demonštráciu výsledku algoritmu uvedeného v článku sa používa trasa obsahujúca odchýlky od skutočnej polohy presahujúce niekoľko kilometrov. Na opravu takýchto chýb sa vyvíja algoritmus, ktorý transformuje postupnosť súradníc. Vstupnými údajmi pre algoritmus je sekvencia súradníc GPS. Každá súradnica obsahuje nasledujúce informácie prijaté zo senzora: Zemepisná šírka Zemepisná dĺžka Azimut v stupňoch Okamžitá rýchlosť objektu v danom bode v m/s
2 Možná odchýlka súradníc objektu od skutočnej hodnoty v metroch Čas na prijatie súradnice snímačom Výsledkom algoritmu je postupnosť súradníc s opravenou zemepisnou šírkou a dĺžkou. Rozhodlo sa použiť Kalmanov filter ako základ pre zostavenie algoritmu, pretože nám umožňuje samostatne brať do úvahy chyby merania a náhodné chyby procesu, ako aj použiť rýchlosť pohybu objektu získanú zo snímača. Stavebníctvo matematický model použitie Kalmanovho filtra Pre použitie Kalmanovho filtra je potrebné, aby bol skúmaný proces opísaný nasledovne: = + + (1) = + (2) Vo vzorci (1) - stavový vektor procesu, A - matica dimenzie n n, popisujúcej prechod pozorovaného procesu zo stavu v podmienke. Vektor popisuje riadiace vplyvy na proces. Matica B dimenzie n l mapuje vektor riadiacich akcií u do zmeny stavu s. je náhodná premenná opisujúca chyby skúmaného procesu a ~0, kde Q je kovariančná matica chýb procesu. Vzorec (2) opisuje merania náhodného procesu. - vektor meraného stavu procesu, matica H s dimenziou m n mapuje stav procesu do dimenzie procesu. - náhodná premenná charakterizujúca chyby merania a ~0, kde P je kovariančná matica chýb merania. Keďže sa skúma proces pohybu objektu, stavová rovnica je zostavená na základe pohybovej rovnice telesa = + +!" #$ % & ". Okrem toho neexistuje Ďalšie informácie o pohybovom procese, preto sa uvažuje, že riadiaci úkon je rovný 0. Za stav procesu sa berie vektor = + () *, -. +, kde x, y sú súradnice objektu a sú projekcie rýchlosti objektu. Pre uvažovaný proces má teda rovnica (1) tento tvar: = + /!, (3) Mládežnícky vedecko-technický bulletin FS, ISSN
3 kde = ! = 3! + 7 " 0 ; 6 2: 6 " / = : 6 0: 6 2: 6 0: , (4)!,4, (5) (6) V tomto modeli sa zrýchlenie objektu považuje za náhodné chyba procesu. Vychádzajú z nasledujúcich predpokladov: a) Zrýchlenia pozdĺž rôznych osí sú nezávislé náhodné premenné.),* b)
4 = AB = C. CE = C/!!. /. =/C!!. /. Keďže zložky vektora ak (5) sú nezávislé náhodné premenné, potom C!!. = " 0 " G. V dôsledku toho má vzorec (7) nasledujúci tvar: = / " (8) Vektor merania zk pre tento problém je reprezentovaný takto: H I = 0 + J, J (7) 2, (9) kde H, I sú súradnice objektu prijatého zo senzora, J +, J je rýchlosť objektu prijatého zo senzora Matica H vo vzorci (2) sa považuje za rovnajúcu sa matici rozmerov 4 4, keďže v rámci tohto problému sa predpokladá, že meranie je lineárna kombinácia stavového vektora a za danú sa považuje kovariančná matica chyby merania. možné možnosti jeho výpočty sú využitím údajov o očakávanej presnosti merania získaných zo snímača. Aplikácia Kalmanovho filtra na skonštruovaný model Pre aplikáciu filtra je potrebné zaviesť nasledujúce pojmy: - posteriori odhad stavu objektu v momente k, získaný z výsledkov pozorovaní do momentu k vrátane. L je nekorigovaný zadný odhad stavu objektu v čase k. - posteriorná kovariančná matica chýb, ktorá špecifikuje odhad presnosti získaného odhadu stavového vektora a zahŕňa odhad chybových rozptylov vypočítaného stavu a kovariancií, zobrazujúci zistené vzťahy medzi parametrami stavu systému. L je neupravená matica chýb zadnej kovariancie. Matica P0 je nastavená na nulu, pretože sa predpokladá, že počiatočná poloha objektu je známa. Mládežnícky vedecko-technický bulletin FS, ISSN
5 Jedna iterácia Kalmanovho filtra pozostáva z dvoch fáz: extrapolácie a korekcie. a) V štádiu extrapolácie sa odhad L vypočíta z odhadu stavového vektora L a kovariančnej matice chýb L podľa nasledujúcich vzorcov: L =, (10) L =. +, (11) kde maticu Ak poznáme zo vzorca (4), maticu Qk vypočítame pomocou vzorca (8). b) V štádiu korekcie sa matica faktorov zosilnenia Kk vypočíta pomocou nasledujúceho vzorca: M = L. L. + (12) kde R, H sa považujú za známe. Kk sa používa na korekciu odhadu stavu objektu L a chybovej kovariančnej matice L takto: = L + M L, (13) = N M L, (14) kde I je matica identity. Treba poznamenať, že na použitie vyššie uvedených vzťahov je potrebné, aby jednotky merania boli konzistentné pre parametre objektu zahrnuté vo výpočtoch. V zdrojových údajoch sú však zemepisná šírka a dĺžka uvedené v uhlových súradniciach a rýchlosť v metrických súradniciach. Okrem toho je tiež pohodlnejšie špecifikovať zrýchlenie pre výpočet chyby procesu v metrických jednotkách. Vincentiho vzorce sa používajú na prevod rýchlosti a zrýchlenia na uhlové jednotky. Výsledok filtra Na obr. 1 znázorňuje príklad cesty pred spracovaním. Všimnete si, že v tomto príklade je niekoľko súradníc s vysoký stupeň chyby, ktoré sú vyjadrené v prítomnosti „vrcholov“ súradníc výrazne odstránených z hlavnej trasy. Na obr. Obrázok 2 ukazuje výsledok filtra pracujúceho s touto cestou.

6 Obr. 1. Trasa objektu Obr. 2. Trasa objektu po použití filtra Výsledkom je, že prakticky neexistujú žiadne „vrcholy“, s výnimkou najväčšieho, ktorý bol citeľne zmenšený a zvyšok trasy bol vyhladený. Použitím vyššie uvedeného algoritmu bolo teda možné znížiť stupeň skreslenia trasy a zvýšiť jej vizuálnu kvalitu. Záver V tejto práci sme uvažovali o prístupe ku korekcii GPS súradníc pomocou Kalmanovho filtra. Pomocou vyššie uvedeného algoritmu bolo možné eliminovať najvýraznejšie deformácie trasy, čo demonštruje použiteľnosť túto metódu k problému vyhladzovania trasy a eliminácie špičiek. Pre ďalšie zlepšenie kvality algoritmu je však potrebné dodatočné spracovanie postupnosti súradníc pre účely Vedecko-technického bulletinu mládeže FS, ISSN.
7 eliminácia nadbytočných bodov, ktoré vznikajú, keď nedochádza k pohybu pozorovaného objektu. Literatúra 1. Yadav J., Giri R., Meena L. Error handling in GPS data processing // Mausam Vol. 62.č. 1. P Kalman R. E. A New Approach to Linear Filtering and Prediction Problems // Transactions of the ASME Journal of Basic Engineering Vol. 82.č. Séria D. P. P. Welch G., Bishop G. Úvod do Kalmanovho filtra: Tech. Rep. TR Dostupné na: prístup Vincenty T. Priame a inverzné riešenia geodetiky na elipsoide s aplikáciou vnorených rovníc // Prehľad prieskumu apr. Vol. 23. Bez PP
UDC 519.711.2 Algoritmus na odhad parametrov orientácie kozmickej lode pomocou Kalmanovho filtra D. I. Galkin 1 1 MSTU im. N.E. Bauman, Moskva, 155, Rusko Uvádza sa popis konštrukcie Kalmanovho filtra
FEDERÁLNA AGENTÚRA PRE TECHNICKÚ REGULÁCIU A METROLÓGIU NÁRODNÝ ŠTANDARD Ruská federácia GOST R 53608-2009 Globálna navigácia satelitný systém METÓDY A TECHNOLÓGIE REALIZÁCIE
PROGNÓZA BAYESIAN TIME SÉRIE NA ZÁKLADE MODELOV ŠTÁTNEHO VESMÍRU V I Lobach Belorussky Štátna univerzita Minsk Bielorusko E-mail: lobach@bsub Zvažuje sa metóda prognózovania
MDT 681.5(07) IDENTIFIKÁCIA NELINEÁRNYCH DYNAMICKÝCH OBJEKTOV V ČASOVEJ DOMÉNE D.N. Vyatchennikov, V.V. Kosobutsky, A.A. Nosenko, N.V. Plotnikova Nedostatočné informácie o objektoch počas ich vývoja
Ser. 0. 200. Vydanie. 4 BULLETIN PETERBURSKEJ UNIVERZITY KONTROLNÉ PROCESY MDT 539,3 V. V. Karelin TESTOVACIE FUNKCIE V PROBLÉME RIADENIA PROCESU POZOROVANIA. Úvod. Článok je venovaný problému
ALGORITY UDC 63.1/.7 NA SPRACOVANIE SEKUNDÁRNYCH INFORMÁCIÍ V RADAROVEJ STANICE S RÔZNYMI TYPMI DYNAMICKEJ KONVERZAČNEJ MATICE PRI URČOVANÍ SÚRADNICE VÝŠKOVÉHO UHLA Yanitskiy A.A. vedecký poradca
MDT 5979 + 5933 G A Omarova 630090, Rusko E-mail: gulzira@ravccru hnutie
Úvod do robotiky Prednáška 12. Časť 2. Navigácia a mapovanie. SLAM SLAM Simultaneous Localization And Mapping (simultánna lokalizácia a mapovanie) Úloha SLAM je jednou z
Poznámky k prednáške „Lineárne dynamické systémy. Kalmanov filter." pre odborný kurz „Štrukturálne metódy analýzy obrazu a signálov“ 211 Vzdelávací program: niektoré vlastnosti normálneho rozdelenia. Nech je x R d rozdelené
Lokalizačný systém robota založený na hemisférickej kamere Alexander Ovchinnikov, Hoa Phan Katedra rádioelektroniky Tula State University, Tula, Rusko [e-mail chránený], [e-mail chránený]
Proceedings of MAI Issue 84 UDC 57:5198 wwwmairu/science/trudy/ Určenie chýb bezgimbalového inerciálneho navigačného systému v režimoch rolovania a zrýchlenia Vavilova NB* Golovan AA Kalchenko AO** Moskva
# 08, august 2016 UDC 004.93 "1 Normalizácia údajov 3D kamier pomocou metódy hlavných komponentov na vyriešenie problému rozpoznávania pozícií a správania používateľov inteligentného domu Malykh D.A., študent Rusko,
Národná technická univerzita Ukrajiny "Kyjevský polytechnický inštitút" Katedra prístrojov a orientačných a navigačných systémov Usmernenia za laboratórne práce v odbore „Navigácia
UDC 629.78.018:621.397.13 METÓDA PÁROVÝCH VZDIALENOSTÍ V PROBLÉME LETOVÉHO NASTAVENIA ASTRO SNÍMAČOV SYSTÉMU VESMÍRNYCH AUTOMOBILOV B.M. Sukhovilov Ako sa presnosť a spoľahlivosť astronomických údajov zlepšuje,
UDC 629.05 Riešenie navigačného problému pomocou popruhového inerciálneho navigačného systému a leteckého signálneho systému Mkrtchyan V.I., študent, odbor „Prístroje a systémy pre orientáciu, stabilizáciu a navigáciu“
MODEL VIZUÁLNEHO SYSTÉMU ĽUDSKÉHO OPERÁTORA V ROZPOZNÁVANÍ OBRAZU OBJEKTU Yu.S. Gulina, V.Ya. Moskovská štátna technická univerzita Kolyuchkin pomenovaná po. N.E. Bauman, Vysvetľuje matematické
RAKETOVÉ A KOZMICKÉ NÁSTROJE A INFORMAČNÉ SYSTÉMY 2015, ročník 2, číslo 3, s. 79 83 UDC 681.3.06 SYSTÉMOVÁ ANALÝZA, RIADENIE KOZMICKÝCH VOZIDIEL, SPRACOVANIE INFORMÁCIÍ A SYSTÉMY TELEMETRIE
Lineárne dynamické systémy. Kalmanov filter. Vzdelávací program: niektoré vlastnosti normálneho rozdelenia Hustota rozdelenia.4.3.. -4 x b.5 x b =.7 5 p(x a x b =.7) - x p(x a,x b) p(x a) 4 3 - - -3 x.5
MDT 621.396.671 O. S. Litvinov, A. A. Gilyazova POSÚDENIE POMOCOU METÓDY VLASTNÝCH DIAGRAMOV VPLYVU RUŠIVÝCH SKUPÍN NA PRÍJEM UŽITOČNÉHO SIGNÁLU LINEÁRNOU EKVIDENTNOU ADAPTÍVNOU ANTÉNOU
MDT 681.5.15.44 PRONÓZA KUSOVÝCH STACIONÁRNYCH PROCESOV E.Yu. Alekseeva Zohľadňujú sa diskrétne náhodné procesy obsahujúce parametre, ktoré sa náhle menia v náhodných časoch. Pre
UDC 63966 LINEÁRNE OPTIMÁLNE FILTROVANIE PRE BIELY ŠUM G F Savinov V tejto práci sa získa optimálny algoritmus filtra pre prípad, keď sú vstupné vplyvy a šumy náhodné Gaussovské
Stanovenie kmitavých pohybov netuhých satelitných prvkov pomocou spracovania obrazu videa D.O. Lazarev Moskovský inštitút fyziky a technológie Vedecký školiteľ, Ph.D.: D.S. Ivanov, Inštitút
MDT 004 O METÓDACH SLEDOVANIA A SLEDOVANIA OBJEKTU VO VIDEOSTREME V APLIKÁCII NA VIDEO ANALYTICKÝ SYSTÉM NA ZBER A ANALÝZU MARKETINGOVÝCH ÚDAJOV Chezganov D.A., Serikov O.N. Juhoruský štát
Elektronický časopis "Proceedings of MAI". Vydanie 66 www.ma.u/scence/tud/ UDC 69.78 Upravený navigačný algoritmus na určenie polohy umelej družice pomocou signálov GS/GLONASS Kurshin A. V. Moscow Aviation
MDT 621.396.96 Štúdia algoritmu na stanovenie a potvrdenie trajektórií podľa kritéria M od N Chernova T.S., študentka katedry „Rádio-elektronické systémy a zariadenia“, Rusko, 105005, Moskva, MSTU. N.E.
TEÓRIA A PRAX NAVIGAČNÝCH ZARIADENÍ A SYSTÉMOV MDT 531.383 VPLYV CHYBY OTÁČANIA STOJANA NA PRESNOSŤ KALIBRÁCIE BLOKOVANIA gyroskopov a akcelerometrov Avrutov V. V., Mazepa T. Yu National Technical
6. prednáška Charakteristika portfólií V predchádzajúcich prednáškach sa opakovane používal pojem portfólio Pre matematickú formuláciu problému výberu optimálneho portfólia je potrebné jeho presné vymedzenie
IDENTIFIKÁCIA ČASOVÉHO RADU S MEDZERAMI NA ZÁKLADE ŠTÁTNYCH PRIESTOROVÝCH MODELOV R. I. Merkulov V. I. Lobach Bieloruská štátna univerzita Minsk Bielorusko e-mail: [e-mail chránený] [e-mail chránený]
ZARIADENIA A SYSTÉMY AUTOMATICKÉHO RIADENIA UDC 51971 V N ARSENYEV, AG KOKHANOVSKIJ, AS FADEYEV MATEMATICKÝ MODEL SPOJENIA IZOCHRONICKÝCH VARIÁCIÍ STAVOVÝCH PREMENNÝCH SYSTÉMU RIADENIA S PARAMETROVÝMI PORUCHY
Zborník MAI. Vydanie 89 UDC 629.051 www.mai.ru/science/trudy/ Kalibrácia inerciálneho navigačného systému pri otáčaní okolo vertikálnej osi Matasov A.I.*, Tikhomirov V.V.** Moskovsky
Analytická geometria Modul 1 Maticová algebra Vektorová algebra Text 4 (nezávislá štúdia) Abstrakt Lineárna závislosť vektorov Kritériá pre lineárnu závislosť dvoch, troch a štyroch vektorov
MDT 62 396,26 L.A. Podkolzina, K.. Drugov ALGORITY SPRACOVANIA INFORMACIÍ V NAVIGAČNÝCH SYSTÉMOCH POZEMNÝCH OBJEKTOV PRE KANÁL URČOVANIA POLOHOVÝCH SÚRADNÍC Na určenie súradníc a parametrov
ŠTATISTICKÁ ANALÝZA PARAMETRICKÝCH ČASOVÝCH RADOV S MEDZERKAMI NA ZÁKLADE ŠTÁTNYCH PRIESTOROVÝCH MODELOV S. V. Lobach Bieloruská štátna univerzita Minsk, Bielorusko e-mail: [e-mail chránený]
Matematické metódy na spracovanie údajov MDT 6.39 S. Ya Zhuk.. Kozheshkurt.. Yuzefovich National Technical University of Ukraine „KP“ ave. Pobeda 37 356 Kyjev Ukrajina Inštitút problémov s registráciou informácií NAS
Konštrukcia statiky MM technologických objektov Pri štúdiu statiky technologických objektov sa najčastejšie stretávame s objektmi s nasledujúcimi typmi konštrukčných schém (obr.: O s jedným vstupom x a jedným
Odhad parametrov orientácie kozmickej lode pomocou Kalmanovho filtra Študent, Katedra systémov automatické ovládanie": D.I. Galkin Vedecký vedúci: A.A. Karpunin, Ph.D., docent
5. Meleshko V.V. Zotrvačnosť popruhu navigačné systémy: Učebnica. príspevok / V.V. Meleshko, O.I. Nesterenko. Kirovograd: POLYMED-Service, 211. 172 s. Prijaté pred redaktorom 17. štvrťroku 212 roku ÓKostyuk
MDT 004.896 Aplikácia geometrických transformácií na anamorfizáciu obrázkov Kanev A.I., špecialista Rusko, 105005, Moskva, MSTU. N.E. Bauman, Katedra spracovania informácií a systémov riadenia
4. Metódy Monte Carlo 1 4. Metódy Monte Carlo Na simuláciu rôznych fyzikálnych, ekonomických a iných efektov sa široko používajú metódy nazývané metódy Monte Carlo. Vďačia za svoje meno
Pásmová filtrácia 1 Pásmová filtrácia V predchádzajúcich častiach sa diskutovalo o filtrovaní rýchlych variácií signálu (vyhladzovanie) a jeho pomalých variácií (detrending). Niekedy je potrebné zvýrazniť
[POZNÁMKY] Vysvetlenie základov Kalmanovho filtra pomocou jednoduchej a intuitívnej derivácie Článok Ramseyho Farahera poskytuje jednoduché a intuitívne odvodenie Kalmanovho filtra na účely výučby
MDT 004.932 Algoritmus klasifikácie odtlačkov prstov Lomov D.S., študent Rusko, 105005, Moskva, MSTU. N.E. Bauman, Katedra počítačového softvéru a informačných technológií Vedecký vedúci:
Prednáška NUMERICKÉ CHARAKTERISTIKY SYSTÉMU DVOCH NÁHODNÝCH PREMENNÝCH -ROZMERNÝ NÁHODNÝ VEKTOR ÚČEL PREDNÁŠKY: určiť numerické charakteristiky systému dvoch náhodných veličín: kovariancie počiatočného a centrálneho momentu
Dynamika plodnosti v Čuvašskej republike Obsah Úvod 1. Všeobecný trend pôrodnosť Čuvašská republika 2. Hlavný trend v pôrodnosti 3. Dynamika pôrodnosti v mestských a vidieckych oblastiach
V ROKU 1990-5548 Elektronika a riadiace systémy. 2011. 4(30) 73 UDC656.7.052.002.5:681.32(045) V. M. Sineglazov, doktor inžinierstva. Sciences, Prof., Sh. I. Askerov OPTIMÁLNE KOMPLEXNÉ SPRACOVANIE ÚDAJOV V NAVIGÁCII
MDT 004.896 Vlastnosti implementácie algoritmu na zobrazovanie anamorfných výsledkov Kanev A.I., špecialista Rusko, 105005, Moskva, MSTU. N.E. Bauman, Katedra systémov spracovania informácií a
177 MDT 658.310.8: 519.876.2 POUŽITIE PRESNOSTI ODHADU PRI REZERVÁCII SNÍMAČOV L.I. Luzina Článok pojednáva o možnom prístupe k získaniu novej schémy redundancie senzorov. Tradičné
ZBIERKA VEDECKÝCH PRÁC NSTU. 28,4 (54). 37 44 MDT 59,24 O KOMPLEX PROGRAMOV NA RIEŠENIE PROBLÉMU IDENTIFIKÁCIE LINEÁRNYCH DYNAMICKÝCH DISKRÉTNYCH STACIONÁRNYCH OBJEKTOV G.V. TROSHINA Uvažovalo sa o súbore programov
MDT 625.1:519.222:528.4 S.I. Dolganyuk S.I. Dolganyuk, 2010 ZVYŠOVANIE PRESNOSTI NAVIGAČNÉHO RIEŠENIA PRI UMIESŇOVANÍ POSUNOVACÍCH LOKOMOTÍV POMOCOU POUŽITIA DIGITÁLNYCH MODELOV VÝVOJA TRATE
UDC 531.1 PRISPÔSOBENIE FILTRA KALMAN NA POUŽITIE S MIESTNYMI A GLOBÁLNYMI NAVIGAČNÝMI SYSTÉMAMI A.N. [e-mail chránený]) V.E. [e-mail chránený]) Ústav aplikovanej matematiky pomenovaný po.
AUTOMATIZÁCIA A RIADENIE MDT 68.58.3 A. G. Shpektorov, V. T. Fam Štátna elektrotechnická univerzita v Petrohrade "LETI" pomenovaná po. V. I. Ulyanova (Lenina) Analýza použitia mikromechanických
ZÁKLADY REGRESNEJ ANALÝZY KONCEPCIA KORELAČNÉHO A REGRESNÉHO ANALÝZY Na riešenie problémov ekonomickej analýzy a prognózovania sa často používajú štatistické, reportovacie alebo pozorované údaje.
Prednáška 4. Riešenie sústav lineárnych rovníc metódou jednoduchých iterácií. Ak má systém veľký rozmer (6 rovníc) alebo je matica systému riedka, na riešenie sú efektívnejšie nepriame iteračné metódy
58 vedecká konferencia MIPT Sekcia dynamiky a riadenia pohybu kozmickej lode Systém na určovanie pohybu modelov riadiacich systémov na aerodynamickom stole pomocou videokamery
3. prednáška 5. METÓDY APROXIMÁCIE FUNKCIÍ ÚLOHA Uvažujeme mriežkové tabuľkové funkcie [ a b] y 5. definované v uzloch mriežky Ω. Každá mriežka je charakterizovaná krokmi h nerovnomernými alebo h
1. Numerické metódy riešenia rovníc 1. Sústavy lineárnych rovníc. 1.1. Priame metódy. 1.2. Iteračné metódy. 2. Nelineárne rovnice. 2.1. Rovnice s jednou neznámou. 2.2. Sústavy rovníc. 1.
MDT 621.396 VÝSKUM ALGORITHMOV SPRACOVANIA SEKUNDÁRNYCH INFORMÁCIÍ MULTI-POLOHOVÉHO RADAROVÉHO SYSTÉMU PRE ELIZAČNÝ UHLOVÝ KANÁL Borisov A.N., Glinchenko V.A., Nazarov A.A., Islamov R.V., Suchkov P.V. Vedecké
Téma Numerické metódy lineárnej algebry - - Téma Numerické metódy lineárnej algebry Klasifikácia Existujú štyri hlavné časti lineárnej algebry: Riešenie systémov lineárnych algebraických rovníc (SLAE)
MDT 004.352.242 Obnova rozmazaných obrazov riešením integrálnej rovnice konvolučného typu Ivannikova I.A., študent Rusko, 105005, Moskva, MSTU. N.E. Bauman, Katedra automatizácie
AEROGRAVIMETRICKÉ ZAMERANIE SO ŠTANDARDNÝM REŽIMOM PREVÁDZKY GPS Mogilevsky V.E. Štátny výskumný a produkčný podnik JSC Aerogeofizika Najdôležitejším prvkom určujúcim úspech leteckého geofyzikálneho výskumu je kvalitná navigácia
ANALÝZA AKUSTICKÝCH SIGNÁLOV NA ZÁKLADE KALMANOVEJ FILTRAČNEJ METÓDY I.P. Gurov, P.G. Žiganov, A.M. Ozersky Vlastnosti dynamického spracovania stochastických signálov pomocou diskrétnych
UDC AA Minko IDENTIFIKÁCIA LINEÁRNEHO OBJEKTU REAKCIOU NA HARMONICKÝ SIGNÁL Navrhuje sa zovšeobecnený identifikačný algoritmus založený na integrálnych dvojparametrových Gaussových transformáciách lineárneho stacionárneho
PREDNÁŠKA. Odhad komplexnej amplitúdy signálu. Odhad času oneskorenia signálu. Odhad frekvencie signálu s náhodnou fázou. Spoločný odhad času oneskorenia a frekvencie signálu s náhodnou fázou.
Computational Technologies Ročník 18, 1, 2013 Identifikácia parametrov procesu anomálnej difúzie na základe diferenčných rovníc A. S. Ovsienko Štátna technická univerzita v Samare, Rusko e-mail:
1 PROGNÓZA TRHOVÝCH PODMIENOK PRE PETROCHEMICKÉ PODNIKY Kordunov D.Yu., Bityutsky S.Ya. Úvod. V moderných ekonomických podmienkach, ktoré sa vyznačujú prudkým rozvojom globálnej integrácie
Problém simultánnej lokalizácie a mapovania (SLAM) Roboschool-2014 Andrey Antonov robotosha.ru 10. október 2014 Plán 1 Základy SLAM 2 RGB-D Robot SLAM 3 Andrey Antonov (robotosha.ru) Problém SLAM
MDT 004.021 T. N. Romanova, A. V. Sidorin, V. N. Solyakov, K. V. Kozlov SYNTÉZA MONOCHROMNÉHO OBRAZU Z KONŠTRUKCIE VIACROHODNÝCH PALIET POMOCOU RIEŠENIA ROVNICE JEDU
Národná technická univerzita Ukrajiny "Kyjevský polytechnický inštitút" Katedra prístrojov a orientačných a navigačných systémov Pokyny pre laboratórnu prácu v disciplíne "Navigácia"
Digitálne spracovanie signálu /9 MDT 69,78 ANALYTICKÁ METÓDA NA VÝPOČET CHYB PRI URČOVANÍ UHOLOVEJ ORIENTÁCIE PODĽA SIGNÁLOV SYSTÉMOV SATELITNÝCH RÁDIONAVIGÁCIÍ Aleshechkin A.M. Úvod Režim detekcie
ZNAKY TVORBY POČÍTAČOVÉHO MODELU DYNAMICKÉHO OPTICKO-ELEKTRONICKÉHO SYSTÉMU Pozdnyakova N.S., Torshina I.P. Moskovská štátna univerzita geodézie a kartografie Fakulta optických informácií
Zborník ISA RAS 009. T. 46 III. APLIKOVANÉ PROBLÉMY DISTRIBUOVANÉHO VÝPOČTU Stacionárne stavy v nelineárnom modeli prenosu náboja v DNA * Stacionárne stavy v nelineárnom modeli prenosu náboja v r.
V procese automatizácie technologických procesov na riadenie mechanizmov a celkov je potrebné riešiť merania rôznych fyzikálnych veličín. Môže to byť tlak a prietok kvapaliny alebo plynu, rýchlosť otáčania, teplota a oveľa viac. Meranie fyzikálnych veličín sa vykonáva pomocou analógových snímačov. Analógový signál je dátový signál, v ktorom je každý z reprezentujúcich parametrov opísaný funkciou času a spojitou množinou možné hodnoty. Z kontinuity priestoru hodnôt vyplýva, že akýkoľvek šum vnesený do signálu je nerozoznateľný od užitočného signálu. Preto bude na analógovom vstupe riadiaceho zariadenia prijatá nesprávna hodnota požadovanej fyzikálnej veličiny. Preto je potrebné filtrovať signál prichádzajúci zo snímača.
Jedným z účinných filtrovacích algoritmov je Kalmanov filter. Kalmanov filter je rekurzívny filter, ktorý odhaduje stavový vektor dynamického systému pomocou série neúplných a zašumených meraní. Kalmanov filter využíva dynamický model systému (napríklad fyzikálny zákon pohybu), riadiace akcie a množinu sekvenčné merania vytvoriť optimálne hodnotenie stavu. Algoritmus pozostáva z dvoch opakovaných fáz: predikcie a úpravy. V prvej fáze je vypočítaná predpoveď stavu v nasledujúcom časovom bode (berúc do úvahy nepresnosť ich merania). Na druhom, nové informácie zo snímača koriguje predpokladanú hodnotu (aj s prihliadnutím na nepresnosť a šum tejto informácie).
Vo fáze predpovede:
- Predpoveď stavu systému:
kde je predpoveď stavu systému v aktuálnom čase; – prechodová matica medzi stavmi (dynamický model systému); – predpoveď stavu systému v predchádzajúcom časovom bode; – matica aplikácie kontrolnej činnosti; – kontrolná činnosť v predchádzajúcom časovom bode.
- Predikcia chyby kovariancie:
kde je predpoveď chyby; – chyba v predchádzajúcom časovom bode; – kovariancia procesného šumu.
Počas fázy úpravy:
- Kalmanov výpočet zisku:

kde je Kalmanov zisk; – matica meraní zobrazujúca vzťah medzi meraniami a stavmi; – kovariancia šumu merania.
kde je meranie v aktuálnom čase.
- Aktualizácia chyby kovariancie:
kde je matica identity.
Ak je stav systému opísaný jednou premennou, potom = 1 a matice sa zvrhnú na obyčajné rovnice.
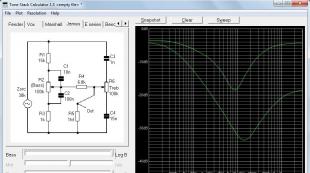
Aby sa jasne preukázala účinnosť Kalmanovho filtra, bol vykonaný experiment so snímačom hlasitosti AVR PIC KY-037, ktorý je pripojený k mikrokontroléru Arduino Uno. Obrázok 1 zobrazuje graf hodnôt snímača bez použitia filtra (riadok 1). Chaotické kolísanie hodnoty na výstupe snímača indikuje prítomnosť šumu.

Obrázok 1. Graf hodnôt snímača bez použitia filtra
Na použitie filtra je potrebné určiť hodnoty premenných a , ktoré určujú dynamiku systému a merania. Vezmime a rovná sa 1 a rovná sa 0, pretože v systéme neexistujú žiadne riadiace akcie. Na určenie vyhladzovacích vlastností filtra je potrebné vypočítať hodnotu premennej, ako aj vybrať hodnotu parametra.
Premennú vypočítame v programe Microsoft Excel 2010. K tomu je potrebné vypočítať smerodajnú odchýlku pre vzorku hodnôt snímača. = 0,62. zvolená v závislosti od požadovanej úrovne filtrácie, odber = 0,001. Na obrázku 2 je v druhom riadku znázornený graf hodnôt snímača pomocou filtra.

Obrázok 2. Graf hodnôt snímača s použitím Kalmanovho filtra.
Z grafu môžeme usúdiť, že filter si poradil s úlohou odfiltrovania rušenia, keďže v ustálenom stave sú výkyvy v odčítaní filtrovaných senzorov nevýznamné.
Kalmanov filter má však významnú nevýhodu. Ak sa množstvo merané snímačom môže rýchlo meniť, filtrované údaje snímača sa nezmenia tak rýchlo ako merané množstvo. Obrázok 3 zobrazuje odozvu Kalmanovho filtra na skok v nameranej hodnote.

Obrázok 3. Odozva Kalmanovho filtra na skok v nameranej hodnote
Reakcia filtra na skok v nameranej hodnote sa ukázala ako nevýznamná. Ak sa nameraná hodnota výrazne zmení a potom sa nevráti na predchádzajúcu hodnotu, filtrované hodnoty snímača budú zodpovedať skutočnej hodnote nameranej hodnoty až po značnom čase, čo je neprijateľné pre automatické riadiace systémy, ktoré vyžadujú vysoký výkon .
Z experimentu môžeme vyvodiť záver, že je vhodné použiť Kalmanov filter na filtrovanie údajov snímača v systémoch s nízkym výkonom.
Bibliografia:
- GOST 17657-79. Prenos dát. Pojmy a definície. – Moskva: Vydavateľstvo noriem, 2005. – 2 s.
- Kalmanov filter // Wikipedia. . Dátum aktualizácie: 26.04.2017. URL: http://ru.wikipedia.org/?oldid=85061599 (dátum prístupu: 21.05.2017).
Kalmanov filter
Kalmanov filter je široko používaný v inžinierskych a ekonometrických aplikáciách, od radarových a kamerových systémov až po odhad parametrov makroekonomických modelov. Kalmanovo filtrovanie je dôležitá časť teória riadenia hrá veľkú úlohu pri tvorbe riadiacich systémov. Spolu s lineárno-kvadratickým regulátorom Kalmanov filter umožňuje riešiť problém lineárno-kvadratického Gaussovho riadenia. Kalmanov filter a lineárny kvadratický regulátor - Možné riešenie najzákladnejších problémov teórie riadenia.
Vo väčšine aplikácií je počet parametrov, ktoré definujú stav objektu, väčší ako počet pozorovateľných parametrov dostupných na meranie. Pomocou modelu objektu založeného na množstve dostupných meraní Kalmanov filter umožňuje získať odhad vnútorného stavu.
Kalmanov filter je určený na rekurzívny odhad vektora stavu a priori známeho dynamického systému, to znamená, že na výpočet aktuálneho stavu systému je potrebné poznať aktuálne meranie, ako aj predchádzajúci stav samotného filtra. . Kalmanov filter, podobne ako mnoho iných rekurzívnych filtrov, je teda implementovaný skôr v časovej než frekvenčnej reprezentácii.
Jasným príkladom možností filtra je získavanie presných, priebežne aktualizovaných odhadov polohy a rýchlosti nejakého objektu na základe výsledkov časových radov nepresných meraní jeho polohy. Napríklad v radare je úlohou sledovať cieľ, určiť jeho polohu, rýchlosť a zrýchlenie, pričom výsledky meraní prichádzajú postupne a sú veľmi hlučné. Kalmanov filter používa pravdepodobnostný model dynamiky cieľa, ktorý špecifikuje typ pravdepodobného pohybu objektu, ktorý znižuje vplyv hluku a poskytuje dobré odhady polohy objektu v súčasnosti, budúcnosti alebo minulosti.
Úvod
Kalmanov filter pracuje s konceptom vektora stavu systému (súbor parametrov popisujúcich stav systému v určitom časovom bode) a jeho štatistickým popisom. Vo všeobecnom prípade je dynamika určitého stavového vektora opísaná hustotou pravdepodobnosti rozloženia jeho zložiek v každom časovom okamihu. Ak máte určitý matematický model pozorovaní systému, ako aj model apriórnej zmeny parametrov stavového vektora (konkrétne ako Markovov formačný proces), môžete napísať rovnicu pre zadnú hustotu pravdepodobnosti stavový vektor kedykoľvek. Táto diferenciálna rovnica sa nazýva Stratonovichova rovnica. Stratonovichova rovnica nemôže byť vyriešená vo svojej všeobecnej forme. Analytické riešenie je možné získať len v prípade viacerých obmedzení (predpokladov):
- Gaussianita apriórnych a posteriórnych pravdepodobnostných hustôt stavového vektora v ľubovoľnom čase (vrátane počiatočného)
- Gaussianita tvarovacieho hluku
- Gaussianita pozorovacieho šumu
- belosť pozorovacieho šumu
- linearita pozorovacieho modelu
- linearita modelu procesu tvárnenia (ktorý, pripomínam, musí byť Markovovým procesom)
Klasický Kalmanov filter je rovnica na výpočet prvého a druhého momentu zadnej hustoty pravdepodobnosti (v zmysle vektora matematických očakávaní a matice rozptylov vrátane recipročných) za daných obmedzení. Vzhľadom na skutočnosť, že pre normálnu hustotu pravdepodobnosti matematické očakávanie a disperzná matica úplne definujú hustotu pravdepodobnosti, môžeme povedať, že Kalmanov filter vypočítava posteriórnu hustotu pravdepodobnosti stavového vektora v každom časovom bode. To znamená, že úplne opisuje stavový vektor ako náhodnú vektorovú veličinu.
Vypočítané hodnoty matematických očakávaní sú v tomto prípade optimálnymi odhadmi podľa kritéria odmocnina, ktoré určuje jeho široké použitie.
Existuje niekoľko druhov Kalmanovho filtra, ktoré sa líšia v aproximáciách a trikoch, ktoré je potrebné použiť na zmenšenie filtra do opísanej podoby a zmenšenie jeho rozmerov:
- Rozšírený Kalmanov filter (EKF). Zníženie nelineárnych pozorovacích modelov a procesu tvarovania pomocou linearizácie prostredníctvom rozšírenia Taylorovho radu.
- Neparfumovaný Kalmanov filter (UKF). Používa sa v problémoch, v ktorých jednoduchá linearizácia vedie k zničeniu užitočné spojenia medzi zložkami stavového vektora. V tomto prípade je „linearizácia“ založená na premene bez vône.
- Ensemble Kalman filter (EnKF). Používa sa na zmenšenie rozmeru problému.
- Možnosti sú možné s nelineárnym prídavným filtrom, ktorý umožňuje zredukovať negaussovské pozorovania na normálne.
- Možnosti s „bieliacim“ filtrom sú možné, čo vám umožňuje pracovať s „farebným“ šumom
- atď.
Použitý dynamický systémový model
Kalmanove filtre sú založené na časovo vzorkovaných lineárnych dynamických systémoch. Takéto systémy sú modelované Markovovými reťazcami pomocou lineárnych operátorov a termínov s normálnym rozdelením. Stav systému je opísaný vektorom konečnej dimenzie - stavovým vektorom. V každom časovom kroku lineárny operátor pôsobí na stavový vektor a prenáša ho do iného stavového vektora (deterministická zmena stavu), pridáva sa určitý vektor normálneho šumu (náhodné faktory) a vo všeobecnom prípade riadiaci vektor, ktorý modeluje vplyv riadiaceho systému. Kalmanov filter možno považovať za obdobu skrytých Markovových modelov s tým rozdielom, že premenné popisujúce stav systému sú prvkami nekonečnej množiny reálnych čísel (na rozdiel od konečnej množiny stavového priestoru v skrytých Markovových modeloch). Okrem toho môžu skryté Markovove modely používať ľubovoľné distribúcie pre následné hodnoty stavového vektora, na rozdiel od Kalmanovho filtra, ktorý používa model normálneho rozdelenia šumu. Existuje prísny vzťah medzi rovnicami Kalmanovho filtra a skrytý model Markovej. Prehľad týchto a iných modelov poskytujú Roweis a Chahramani (1999).
Pri použití Kalmanovho filtra na získanie odhadov vektora stavu procesu zo série zašumených meraní je potrebné reprezentovať model tento proces v súlade so štruktúrou filtra - vo forme maticovej rovnice určitého typu. Za každý úder k prevádzky filtra, je potrebné určiť matice v súlade s nižšie uvedeným popisom: vývoj procesu F k; pozorovacia matica H k; procesná kovariančná matica Q k; meranie šumu kovariančná matica R k; za prítomnosti kontrolných akcií - matica ich koeficientov B k .
Ilustrácia fungovania filtra. Matice sú označené štvorčekmi. Elipsy označujú matice viacrozmerných normálnych rozdelení (vrátane priemerov a kovariancií). Vektory sú ponechané nezakrúžkované. V najjednoduchšom prípade sa niektoré matice v priebehu času nemenia (nezávisia od indexu k), ale sú stále používané filtrom v každom cykle prevádzky.
Model systému/procesu predpokladá skutočný stav v danom čase k sa získava zo skutočného stavu v súčasnosti k−1 podľa rovnice:
,- F k- matica vývoja procesu/systému, ktorá ovplyvňuje vektor X k−1 (stavový vektor momentálne k−1 );
- B k- riadiaca matica, ktorá sa aplikuje na vektor riadiacich akcií u k ;
- w k- normálny náhodný proces s nulovým matematickým očakávaním a kovariančnou maticou Q k, ktorá popisuje náhodnú povahu vývoja systému/procesu:
V momente k sa vykonáva pozorovanie (meranie). z k skutočný stavový vektor X k, ktoré sú navzájom spojené rovnicou:
Kde H k- matica merania spájajúca vektor skutočného stavu a vektor vykonaných meraní, v k- biely Gaussov šum meraní s nulovým matematickým očakávaním a kovariančnou maticou R k :
Počiatočný stav a vektory náhodných procesov v každom hodinovom cykle ( X 0 , w 1 , …, w k , v 1 , …, v k) sa považujú za nezávislé.
Mnoho skutočných dynamických systémov nie je možné presne opísať týmto modelom. V praxi môže dynamika, ktorá sa v modeli nezohľadňuje, vážne pokaziť výkon filtra, najmä pri práci s neznámym stochastickým vstupným signálom. Navyše, dynamika, ktorá sa v modeli nezohľadňuje, môže spôsobiť, že filter bude nestabilný. Na druhej strane nezávislý biely šum ako signál nespôsobí divergenciu algoritmu. Problém oddelenia šumu merania od dynamiky nezohľadnenej v modeli je komplexný, rieši sa pomocou teórie robustných riadiacich systémov.
Kalmanov filter
Kalmanov filter je typ rekurzívneho filtra. Na výpočet hodnotenia stavu sústavy pre aktuálny cyklus prevádzky potrebuje posúdenie stavu (formou hodnotenia stavu sústavy a odhadu chyby pri určovaní tohto stavu) na k. predchádzajúci cyklus prevádzky a merania v aktuálnom cykle. Táto vlastnosť ho odlišuje od paketových filtrov, ktoré vyžadujú znalosť histórie meraní a/alebo odhadov počas aktuálneho cyklu prevádzky. Nižšie, pomocou zápisu, budeme rozumieť odhadu skutočného vektora v súčasnosti n berúc do úvahy merania od okamihu začatia prác do m vrátane.
Stav filtra je určený dvoma premennými:
Iterácie Kalmanovho filtra sú rozdelené do dvoch fáz: extrapolácia a korekcia. Počas extrapolácie filter prijíma predbežné posúdenie stav systému (v ruskojazyčnej literatúre sa často označuje , kde znamená „extrapolácia“ a k- číslo tiku, v ktorom bol prijatý) pre aktuálny krok podľa konečného hodnotenia stavu z predchádzajúceho kroku (alebo predbežný odhad pre ďalší tick podľa konečného hodnotenia aktuálneho kroku, v závislosti od výklad). Tento predbežný odhad sa tiež nazýva apriórny odhad stavu, pretože na jeho získanie nepoužíva pozorovania príslušného kroku. Vo fáze korekcie je apriórna extrapolácia doplnená o príslušné merania prúdu na korekciu odhadu. Upravený odhad sa nazýva aj zadný odhad stavu alebo jednoducho odhad stavového vektora. Zvyčajne sa tieto dve fázy striedajú: extrapolácia sa vykonáva na základe výsledkov korekcie až do ďalšieho pozorovania a korekcia sa vykonáva spolu s pozorovaniami dostupnými v ďalšom kroku atď. Je však možný aj iný vývoj udalostí, ak napr. z nejakého dôvodu sa ukázalo, že pozorovanie nie je k dispozícii, potom môže byť fáza korekcie preskočená a extrapolovaná z neupraveného odhadu (a priori extrapolácia). Podobne, ak sú nezávislé merania dostupné len v určitých pracovných cykloch, korekcie sú stále možné (zvyčajne s použitím inej pozorovacej matice H k ).
Extrapolačná fáza
Korekčná fáza
| Odchýlka prijatá v kroku k pozorovania z pozorovania očakávaného z extrapolácie: | |
| Kovariančná matica pre vektor odchýlky (vektor chyby): | |
| Kalmanova matica optimálneho zisku, vytvorená na základe kovariančných matíc existujúcej extrapolácie stavového vektora a získaných meraní (cez kovariančnú maticu vektora odchýlky): | |
| Korekcia predtým získanej extrapolácie stavového vektora - získanie odhadu stavového vektora systému: | |
| Výpočet kovariančnej matice pre odhad vektora stavu systému: |
Výraz pre kovariančnú maticu odhadu vektora stavu systému je platný len pri použití daného optimálneho vektora koeficientov. Vo všeobecnosti má tento výraz zložitejšiu formu.
Invarianty
Ak je model absolútne presný a absolútne presne špecifikovaný počiatočné podmienky a potom sa nasledujúce hodnoty zachovajú po ľubovoľnom počte opakovaní filtra - sú to invarianty:
Matematické očakávania odhadov a extrapolácií vektora stavu systému a matíc chýb sú nulové vektory:
kde je matematické očakávanie.
Vypočítané kovariančné matice extrapolácií, odhady stavu systému a chybové vektory sa zhodujú so skutočnými kovariančnými maticami:
Príklad konštrukcie filtra
Predstavme si vozík stojaci na nekonečne dlhých koľajniciach bez trenia. Spočiatku je v pokoji v polohe 0, ale pod vplyvom náhodných faktorov podlieha náhodnému zrýchleniu. Polohu vozíka meriame každý ∆ t sekúnd, ale merania sú nepresné. Chceme získať odhady polohy vozíka a jeho rýchlosti. Aplikujme na tento problém Kalmanov filter a určme všetky potrebné matice.
V tomto probléme matice F , H , R A Q nezávisia od času, ich indexy vynecháme. Navyše neovládame vozík, teda riadiacu maticu B neprítomný.
Súradnice a rýchlosť vozíka sú opísané vektorom v lineárny priestorštátov
kde je rýchlosť (prvá derivácia súradnice vzhľadom na čas).
Budeme predpokladať, že medzi ( k−1) a k v tom cykle sa vozík pohybuje konštantným zrýchlením a k, rozdelené podľa normálneho zákona s nulovým matematickým očakávaním a štandardnou odchýlkou σ a. V súlade s newtonovskou mechanikou môžeme písať
.Kovariančná matica náhodných efektov
(σ a- skalárny).Pri každom kroku práce sa meria poloha vozíka. Predpokladajme, že chyba merania vk má normálne rozdelenie s nulovým matematickým očakávaním a štandardnou odchýlkou σ z. Potom
a kovariančná matica šumu pozorovania má tvar
.Počiatočná poloha vozíka je presne známa
, .Ak je poloha a rýchlosť vozíka známa len približne, maticu rozptylu možno inicializovať s dostatočne veľkým číslom L, takže počet presahuje rozptyl súradnicových meraní
, .V tomto prípade v prvých cykloch prevádzky filter použije výsledky merania s väčšou váhou, ako sú dostupné apriórne informácie.
Odvodzovanie vzorcov
Kovariančná matica odhadu stavového vektora
Podľa definície kovariančnej matice P k|k
nahraďte výraz, aby ste odhadli stavový vektor
a napíšte výraz pre chybový vektor
a meracie vektory
vyberieme vektor chyby merania v k
od vektora chyby merania v k nekoreluje s inými argumentmi, dostaneme výraz
v súlade s vlastnosťami vektorovej kovariancie sa tento výraz transformuje do formy
nahradenie výrazu pre kovariančnú maticu extrapolácie stavového vektora s P k|k−1 a určenie kovariančnej matice pozorovacieho šumu na R k, dostaneme
Výsledný výraz je platný pre maticu ľubovoľných koeficientov, ale ak ide o maticu Kalmanových optimálnych koeficientov, potom je možné tento výraz pre kovariančnú maticu zjednodušiť.
Matrix optimálneho zisku
Kalmanov filter minimalizuje súčet druhých mocnín matematických očakávaní chýb v odhade stavového vektora.
Vektor chyby odhadu stavového vektora
Úlohou je minimalizovať súčet matematických očakávaní druhých mocnín zložiek daného vektora
,čo je ekvivalentné minimalizácii stopy kovariančnej matice odhadu stavového vektora P k|k. Dosaďte existujúce výrazy do výrazu pre kovariančnú maticu odhadu stavového vektora a doplňte ho na úplný štvorec:
Všimnite si, že posledný člen je kovariančná matica nejakej náhodnej premennej, takže jej stopa je nezáporná. Minimum sledovania sa dosiahne, keď je posledný člen nastavený na nulu:
Tvrdí sa, že táto matica je požadovaná a keď sa použije ako matica koeficientov v Kalmanovom filtri, minimalizuje súčet stredných kvadratických chýb pri odhadovaní stavového vektora.
Kovariančná matica odhadu stavového vektora pomocou matice optimálnych koeficientov
Výraz pre kovariančnú maticu odhadu stavového vektora P k|k pri použití optimálnej matice koeficientov bude mať tvar:
Tento vzorec je výpočtovo jednoduchší, a preto sa v praxi používa takmer vždy, no správny je len pri použití optimálnej matice koeficientov. Ak v dôsledku nízkej výpočtovej presnosti vznikne problém s výpočtovou stabilitou, alebo sa špecificky použije iná ako optimálna matica koeficientov, mal by sa použiť všeobecný vzorec pre kovariančnú maticu odhadu stavového vektora.
Kalmanov filter je pravdepodobne najpopulárnejším filtrovacím algoritmom používaným v mnohých oblastiach vedy a techniky. Pre svoju jednoduchosť a efektívnosť ho nájdeme v prijímačoch GPS, procesoroch dát senzorov, pri implementácii riadiacich systémov atď.
Na internete je veľa článkov a kníh o Kalmanovom filtri (väčšinou v angličtine), ale tieto články majú pomerne vysokú bariéru vstupu, existuje veľa nejasných miest, hoci v skutočnosti ide o veľmi jasný a transparentný algoritmus. Pokúsim sa vám o tom povedať jednoduchým jazykom, s postupným zvyšovaním zložitosti.
Načo to je?
Každý merací prístroj má nejakú chybu a môže byť ovplyvnený veľké množstvo vonkajšie a vnútorné vplyvy, čo vedie k tomu, že informácie z neho sú zašumené. Čím sú dáta hlučnejšie, tým ťažšie je spracovať takéto informácie.Filter je algoritmus spracovania údajov, ktorý odstraňuje šum a zbytočné informácie. V Kalmanovom filtri je možné špecifikovať a priori informácie o charaktere systému, vzťahu premenných a na základe toho zostaviť presnejší odhad, ale aj v tom najjednoduchšom prípade (bez zadávania apriórnych informácií) dáva vynikajúce výsledky.
Uvažujme najjednoduchší príklad- Predpokladajme, že potrebujeme kontrolovať hladinu paliva v nádrži. Na tento účel je v nádrži nainštalovaný kapacitný snímač, ktorý sa veľmi ľahko udržiava, ale má určité nevýhody - napríklad závislosť od paliva (dielektrická konštanta paliva závisí od mnohých faktorov, napríklad od teploty); ) a veľký vplyv „fľaškovania“ v nádrži. Výsledkom je, že informácie z neho predstavujú typickú „pílu“ so slušnou amplitúdou. Tieto typy snímačov sú často inštalované na ťažkých banských zariadeniach (nenechajte sa zmiasť objemom nádrže):
Kalmanov filter
Poďme trochu odbočiť a zoznámiť sa so samotným algoritmom. Kalmanov filter využíva dynamický model systému (napríklad fyzikálny zákon pohybu), známe riadiace vstupy a viaceré sekvenčné merania na vytvorenie optimálneho odhadu stavu. Algoritmus pozostáva z dvoch opakovaných fáz: predikcie a úpravy. V prvej fáze sa počíta s predikciou stavu v najbližšom časovom okamihu (berúc do úvahy nepresnosť ich merania). Po druhé, nové informácie zo snímača opravia predpokladanú hodnotu (aj s prihliadnutím na nepresnosť a šum týchto informácií):Rovnice sú prezentované vo forme matice, ak nepoznáte lineárnu algebru, je to v poriadku, nasleduje zjednodušená verzia bez matíc pre prípad s jednou premennou. V prípade jednej premennej matice degenerujú na skalárne hodnoty.
Najprv pochopme notáciu: dolný index označuje časový okamih: k - aktuálny, (k-1) - predchádzajúci, znamienko mínus v hornom indexe označuje, že tento predpovedané stredná hodnota.
Popisy premenných sú uvedené na nasledujúcich obrázkoch:
Môžete dlho a zdĺhavo opisovať, čo znamenajú všetky tieto záhadné prechodové matice, ale podľa môjho názoru je lepšie skutočný príklad skúste použiť algoritmus, aby abstraktné významy nadobudli skutočný význam.
Skúsme to v akcii
Vráťme sa k príkladu so snímačom hladiny paliva, keďže stav systému je reprezentovaný jednou premennou (objem paliva v nádrži), matice degenerujú do obyčajných rovníc:Definovanie modelu procesu
Aby bolo možné použiť filter, je potrebné určiť matice/hodnoty premenných, ktoré určujú dynamiku systému a rozmery F, B a H:F- premenná popisujúca dynamiku systému v prípade paliva - môže to byť koeficient, ktorý určuje spotrebu paliva pri voľnobehu počas vzorkovacieho času (čas medzi krokmi algoritmu). Okrem spotreby paliva sú však aj čerpacie stanice...pre jednoduchosť túto premennú nastavíme na 1 (čiže naznačíme, že predpovedaná hodnota sa bude rovnať predchádzajúcemu stavu).
B- premenná určujúca uplatnenie riadiaceho pôsobenia. Ak by sme mali ďalšie informácie o otáčkach motora alebo stupni stlačenia plynového pedálu, potom by tento parameter určoval, ako by sa zmenila spotreba paliva počas vzorkovacieho obdobia. Keďže v našom modeli nie sú žiadne kontrolné akcie (nie sú o nich žiadne informácie), akceptujeme B = 0.
H- maticu definujúcu vzťah medzi meraniami a stavom systému zatiaľ bez vysvetlenia akceptujeme túto premennú rovnú 1.
Definovanie vyhladzovacích vlastností
R- chybu merania možno zistiť skúšaním meracích prístrojov a určením chyby ich merania.Q- určenie procesného šumu je náročnejšia úloha, pretože je potrebné určiť rozptyl procesu, čo nie je vždy možné. V každom prípade môžete vybrať tento parameter, aby ste zabezpečili požadovanú úroveň filtrácie.
Poďme to implementovať do kódu
Aby sme rozptýlili zostávajúci zmätok, implementujme zjednodušený algoritmus v C# (bez matíc a kontrolných akcií):trieda KalmanFilterSimple1D
{
public double X0 (get; private set;) // predpokladaný stav
public double P0 ( get; private set; ) // predpokladaná kovariancia
Public double F ( get; private set; ) // faktor skutočnej hodnoty k predchádzajúcej skutočnej hodnote
public double Q ( get; private set; ) // šum merania
public double H ( get; private set; ) // faktor nameranej hodnoty na skutočnú hodnotu
public double R ( get; private set; ) // hluk prostredia
Verejný dvojitý štát ( get; private set; )
verejná dvojitá kovariancia (získať; súkromná množina; )
Verejný KalmanFilterSimple1D(dvojité q, dvojité r, dvojité f = 1, dvojité h = 1)
{
Q = q;
R = r;
F = f;
H = h;
}
Verejné void SetState (dvojitý stav, dvojitá kovariancia)
{
Štát = štát;
Kovariancia = kovariancia;
}
Verejná neplatnosť Správne (dvojité údaje)
{
//aktualizácia času - predpoveď
X0 = F*stav;
PO = F*Kovariancia*F + Q;
//aktualizácia merania - oprava
var K = H*PO/(H*PO*H + R);
Stav = X0 + K*(dáta - H*X0);
Kovariancia = (1 - K*H)*F;
}
}
// Aplikácia...
Var palivoData = GetData();
var filter = new List();
Var kalman = new KalmanFilterSimple1D(f: 1, h: 1, q: 2, r: 15); // nastavte F, H, Q a R
kalman.SetState(fuelData, 0,1); // Nastavte počiatočné hodnoty stavu a kovariancie
foreach (var d in fuelData)
{
kalman.Správne(d); // Použiť algoritmus
Filtered.Add(kalman.State); // Uložiť Aktuálny stav
}
Výsledok filtrovania s týmito parametrami je znázornený na obrázku (pre nastavenie stupňa vyhladenia môžete zmeniť parametre Q a R):
Najzaujímavejšia časť zostáva mimo rámca článku - aplikácia Kalmanovho filtra pre niekoľko premenných, špecifikovanie vzťahu medzi nimi a automatické výstupy hodnôt pre nepozorované premenné. Skúsim pokračovať v téme hneď ako budem mať čas.
Dúfam, že popis nebol príliš únavný a zložitý, ak máte nejaké otázky alebo vysvetlenia, vitajte v komentároch)
Random Forest je jeden z mojich obľúbených algoritmov na dolovanie údajov. Po prvé, je neuveriteľne všestranný, dá sa použiť na riešenie regresných aj klasifikačných problémov. Vyhľadajte anomálie a vyberte prediktory. Po druhé, toto je algoritmus, ktorý je naozaj ťažké nesprávne aplikovať. Jednoducho preto, že na rozdiel od iných algoritmov má málo prispôsobiteľných parametrov. A tiež je vo svojej podstate prekvapivo jednoduchý. A zároveň je úžasne presný.
Aká je myšlienka za takým úžasným algoritmom? Myšlienka je jednoduchá: povedzme, že máme nejaký veľmi slabý algoritmus, povedzme . Ak robíme veľa rôzne modely použitím tohto slabého algoritmu a spriemerovaním výsledku ich predpovedí bude konečný výsledok výrazne lepší. Toto sa nazýva súborové učenie v akcii. Algoritmus náhodného lesa sa preto pre prijaté údaje nazýva „náhodný les“, vytvára mnoho rozhodovacích stromov a potom spriemeruje výsledok ich predpovedí. Dôležitý bod Pri tvorbe každého stromu je prvok náhody. Je predsa jasné, že ak vytvoríme veľa rovnakých stromov, tak výsledok ich spriemerovania bude mať presnosť jedného stromu.
ako pracuje? Predpokladajme, že máme nejaké vstupné údaje. Každý stĺpec zodpovedá nejakému parametru, každý riadok zodpovedá nejakému dátovému prvku.
Z celého súboru údajov môžeme náhodne vybrať určitý počet stĺpcov a riadkov a na základe nich zostaviť rozhodovací strom.

štvrtok 10. mája 2012
štvrtok 12. januára 2012

To je všetko. 17-hodinový let sa skončil, Rusko zostáva v zámorí. A cez okno útulného 2-izbového bytu sa na nás pozerá San Francisco, slávne Silicon Valley, Kalifornia, USA. Áno, to je dôvod, prečo v poslednej dobe veľa nepíšem. Presťahovali sme sa.
Všetko to začalo v apríli 2011, keď som mal telefonický rozhovor so Zyngou. Potom mi to všetko pripadalo ako nejaká hra nesúvisiaca s realitou a vôbec som si nevedel predstaviť, k čomu to povedie. V júni 2011 prišla Zynga do Moskvy a urobila sériu pohovorov, zvažovalo sa asi 60 kandidátov, ktorí prešli telefonickým pohovorom a vybrali z nich asi 15 ľudí (neviem presný počet, niektorí si to neskôr rozmysleli, iní okamžite odmietol). Rozhovor sa ukázal byť prekvapivo jednoduchý. Žiadne problémy s programovaním, žiadne zložité otázky o tvare poklopov, väčšinou testovanie vašej schopnosti chatovať. A vedomosti sa podľa mňa hodnotili len povrchne.
A potom začala hádka. Najprv sme čakali na výsledky, potom ponuku, potom schválenie LCA, potom schválenie vízovej petície, potom dokumenty z USA, potom rad na ambasáde, potom dodatočné overenie, potom vízum. Miestami sa mi zdalo, že som pripravený vzdať sa všetkého a skórovať. Občas som pochyboval, či túto Ameriku potrebujeme, napokon ani Rusko nie je zlé. Celý proces trval asi šesť mesiacov a nakoniec sme v polovici decembra dostali víza a začali sa pripravovať na odchod.
Pondelok bol môj prvý pracovný deň na novom mieste. Kancelária má všetky podmienky nielen na prácu, ale aj bývanie. Raňajky, obedy a večere od vlastných kuchárov, množstvo pestrej stravy roztrúsenej vo všetkých kútoch, posilňovňa, masáže a dokonca aj kaderníctvo. To všetko je pre zamestnancov úplne zadarmo. Veľa ľudí dochádza do práce na bicykli a niekoľko miestností je vybavených na uskladnenie vozidiel. Vo všeobecnosti som v Rusku nikdy nič také nevidel. Všetko má však svoju cenu, hneď sme boli upozornení, že budeme musieť veľa pracovať. Čo je podľa ich štandardov „veľa“, mi nie je celkom jasné.
Dúfam však, že aj napriek množstvu práce sa mi v dohľadnej dobe podarí obnoviť blogovanie a možno porozprávam niečo o americkom živote a práci programátora v Amerike. Počkaj a uvidíš. Zatiaľ všetkým prajem šťastný Nový rok a Vianoce a opäť sa vidíme!
Pre príklad použitia si vytlačíme dividendový výnos Ruské spoločnosti. Ako základnú cenu berieme záverečnú cenu akcie v deň uzavretia registra. Z nejakého dôvodu tieto informácie nie sú k dispozícii na webovej stránke Trojky, ale sú oveľa zaujímavejšie ako absolútne hodnoty dividend.
Pozor! Spustenie kódu trvá pomerne dlho, pretože... Pre každú propagačnú akciu musíte požiadať o finam servery a získať jej hodnotu.
Výsledok<- NULL for(i in (1:length(divs[,1]))){ d <- divs if (d$Divs>0)( skúste(( úvodzovky<- getSymbols(d$Symbol, src="Finam", from="2010-01-01", auto.assign=FALSE) if (!is.nan(quotes)){ price <- Cl(quotes) if (length(price)>0) (dd<- d$Divs result <- rbind(result, data.frame(d$Symbol, d$Name, d$RegistryDate, as.numeric(dd)/as.numeric(price), stringsAsFactors=FALSE)) } } }, silent=TRUE) } } colnames(result) <- c("Symbol", "Name", "RegistryDate", "Divs") result

Podobne môžete vytvárať štatistiky za predchádzajúce roky.