Двигатель двойного питания. Вольдек
На компрессорных станциях магистральных газопроводов и иных промышленных объектах, оборудованных электроприводом, между рабочим механизмом и электродвигателем используют промежуточное звено - редуктор. Существует особый класс электрических машин, применение которых позволило бы исключить редуктор. Это машины двойного питания (МДП). Исследование МДП, имеющих двойную синхронную скорость на валу, т.е. 6000 об/мин при частоте 50 Гц и 2-х полюсным исполнением, имеет весьма большое практическое значение для промышленности, так как позволяет создать безредукторный электропривод мощных центробежных компрессоров и насосов. Использование надежного и экономичного электропривода позволяет более просто осуществлять задачи комплексной автоматизации промышленных объектов.
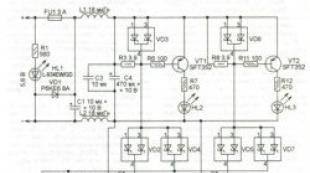
В лаборатории была исследована МДП в режиме двигателя с параллельным соединением обмоток при питания их от сети промышленной частоты, и при вращении с двойной синхронной скоростью. Исследования проводились с помощью балансирной установки. В этой установке испытываемый двигатель жестко связан через муфту с машиной постоянного тока, корпус которой в определенных пределах мог свободно вращаться относительно вала. Принципиальная схема установки, на которой было проведено экспериментальное исследование, показана на рис.1 , на котором обозначены:
МДП - испытываемая асинхронная машина в режиме двигателя двойного питания;
МПС и ГПС - машины постоянного тока независимого возбуждения.
Машинапостоянного тока (МПС) служит разгонным двигателем для МДП, а также является динамометром, который позволяет непосредственно измерять вращающий момент МДП и осуществлять её загрузку.
В качестве испытываемой МДП использован серийный асинхронный двигатель с фазным ротором, который имеет следующие данные:
Тип двигателя - АК-52-6;
Мощность Р ном = 2,8 кВт;
Схема соединения обмоток статора D/Y;
Напряжение статора 220/380 В;
Ток статора 13,0/7,5 А;
Номинальная скорость вращения вала 920 об/мин;
КПД - 75,5 %;
Коэффициент мощности cosj= 0,74;
Соединение обмоток ротора Y;
Напряжение 91 В;
Ток 21,2 А.
Машины МПС и ГПС - обычные серийные машины постоянного тока типа ПН-85 с данными: Р ном = 5,6 кВт, U = 220 B, I ном = 30 А, n = 1000 об/мин.
Питание ротора R МДП осуществлялось через регулируемый трёхфазный автотрансформатор типа РНТ. Для синхронизации МДП с сетью использованы обычные лампы накаливания, включённые в режим уменьшения яркости в момент синхронизации.
Перед запуском установки необходимо найти прямое вращение поля статора и обратное вращение поля ротора МДП. Для этого выводные концы обмотки ротора R соединяют между собой и МДП запускают как обычный короткозамкнутый электродвигатель подачей напряжения на статор с помощью автоматического выключателя QF1. При этом фиксируют направление вращения ротора двигателя. Затем, осуществляют включение МДП обращённым асинхронным двигателем подачей напряжения на ротор, предварительно соединив между собой выводные концы обмотки статора S. Одинаковое направление вращение ротора в первом и во втором случае соответствует обратному вращению поля ротора, то есть обратному чередованию фаз ротора. Если это условие не выполняется, то меняют местами подключение к фазам сети А, В, С любых двух выводов обмотки статора S или ротора R и вновь проверяют выполнение указанного условия.
Пуск установки осуществляют следующим образом: запускают приводной асинхронный двигатель АД генератора ГПС, резистором R3 устанавливают напряжение 220 В на его зажимах. Включением QF 1 подают напряжение на статор S МДП, включением QF 2 - на автотрансформатор РНТ. Затем, вращая рукоятку автотрансформатора, устанавливают необходимое напряжение для ротора машины (91 В). При этом лампы накаливания EL горят ровным немигающим светом. Закрепив корпус МПC стопорными винтами, запускают последнюю включением автоматического выключателя QF4 и уменьшением величины резистора R2. Плавно уменьшая магнитный поток МПС резистором R1, разгоняют МДП до двойной синхронной скорости (2000 об/мин).
При повышении скорости вращения МДП частота мигания ламп EL падает. В момент синхронизма (лампы погасли и не загораются) включают автоматический выключатель QF 3 . После нескольких качаний МДП втягивается в синхронизм с сетью и работает как синхронная машина в двигательном режиме при синхронной скорости вращения, равной 2000 об/мин. На этом пуск установки заканчивается.
Изменением магнитного потока МПС (резистором R1) можно плавно регулировать нагрузку МДП от холостого хода до номинальной и выше. Для этого необходимо освободить стопорные винты, крепящие корпус МПС, что даёт возможность непосредственно измерять вращающий момент МДП, пользуясь шкалой балансирной машины и указательной стрелкой, закреплённой на корпусе нагрузочной машины МПС. Выключателем QF 4 можно осуществлять мгновенное включение и отключение любой заранее установленной нагрузки. При этом корпус МПС при толчкообразном набросе нагрузки необходимо закреплять стопорными винтами.
При испытаниях производились измерения тока, напряжения, активной мощности, скорости вращения, вращающегося момента и угла нагрузки и МДП. Измерения в цепи статора осуществлялись при помощи переносного измерительного комплекта типа К-50, а в цепи ротора измерение активной мощности осуществлялось по схеме двух ваттметров типа Д539/4, имеющих пределы измерения по напряжению 75 - 600 В, а по току 5 - 10 А, включённые через трансформаторы тока.
Измерение тока в цепи ротора осуществлялось тремя амперметрами с пределами измерения 0 - 25 А, а для измерения напряжения использовались два вольтметра. Один амперметр со шкалой 0 - 250 В, подключённый к выходу автотрансформатора РНТ, использовался для предварительной установки напряжения, необходимого для ротора МДП. Второй - астатический типа АСТВ с пределами измерения 0 - 150 В был непосредственно подключён к зажимам ротора МДП и использовался конкретно в измерительных целях.
Измерение скорости вращения МДП осуществлялось при помощи стробоскопического устройства типа СТ-5, а измерение угла нагрузки и и исследование колебаний (качаний) МДП - с помощью специального устройства, разработанного автором данной статьи.
Для определения значений тока и мощности холостого хода, механических потерь и потерь в стали, для снятия характеристики намагничивания и определения степени насыщения МДП был проведен опыт холостого хода. Опыт холостого хода проводился по схеме, приведенной на рис.2 , с тем лишь изменением, что обмотки статора МДП и автотрансформатора РНТ были включены в сеть через общий индукционный регулятор. Помимо тех рекомендаций, которые дает ГОСТ для проведения опыта холостого хода, нужно иметь в виду, что на холостом ходу при пониженных напряжениях МДП работает неустойчиво и выпадает из синхронного режима работы. Устойчивая работа может быть достигнута, если МДП имеет на валу нагрузку, величина которой может быть незначительной по сравнению с мощностью машины.
Методика снятия данных при проведении опыта холостого хода
МДП запускается и незначительно загружается. Индукционным регулятором устанавливается необходимое напряжение на статоре, автотрансформатором РНТ - на роторе (необходимые точки напряжений рассчитывают заранее с учетом постоянства коэффициента трансформации машины). Выключателем QF 4 снимается нагрузка с МДП, затем проверяется соответствие установленных точек напряжения на статоре и роторе, если необходимо, то проводят коррекцию, после чего снимают показания приборов и снова (включением QF 4) нагружают машину. Аналогично получают другие точки характеристики холостого хода. Сразу же после опыта холостого хода проводят измерение сопротивлений обмоток статора и ротора при помощи измерительного моста. Для цепи статора сопротивление составило 1,153 Ом, для цепи ротора - 0,15 Ом.
Мощность, потребляемая статором МДП на холостом ходу, покрывает потери в меди обмотки статора, в стали и часть механических потерь, то есть:
Р 1 = Р М1 + Р С1 + Р МЕХ1 (1)
Аналогично для ротора МДП
Р 2 = Р М2 + Р С2 + Р МЕХ2 (2)
Из этих выражений видно, что МДП не имеет вторичных потерь, т.к. энергия сети подводится и к статору, и к ротору. Для разделения механических потерь и потерь в стали выделяем потери в меди из записанных выше выражений.
В этом случае
P OS = P 1 - P M1 = P C1 + P МЕХ1 , (3)
P OR = P 2 - P M2 = P C2 + P МЕХ2
где P OS и P OR - потери холостого хода в статоре и, соответственно, в роторе.
Разделение потерь холостого для цепи статора двигателя АК-52-6 в режиме МДП показано на рис.3 . Аналогичное разделение потерь проводят для цепи ротора.
Путем разделения потерь получено, что механические потери, покрываемые со стороны статора, составляют 270 Вт, а со стороны ротора - 256 Вт, т.е. имеем фактически равное покрытие механических потерь как со стороны статора, так и со стороны ротора. Общие механические потери МДП составляют 526 Вт, что превышает механические потери АК-52-6 в обычном асинхронном режиме из-за большей скорости вращения двигателя в этом режиме работы.
Коэффициент мощности при холостом ходе МДП для статора определяют по формуле:
cosj= P 1 / (Ö3U 1 *I 01) (5)
Аналогично определяют коэффициент мощности для ротора. Индуктивные составляющие токов холостого хода для статора и ротора находят из выражений
I m1 = I O 1 *sinj 1 (6)
I m2 = I O 2 *sinj 2 . (7)
Из данных опыта холостого хода и результатов их обработки следует вывод:
ток холостого хода исследуемой машины в режиме МДП остается прежним, следовательно, можно говорить об относительном уменьшении тока холостого хода в два раза, т.к. мощность машины в этом режиме удваивается.
Нарис.3 показаны кривые намагничивания исследуемого двигателя в режиме МДП, где U Ф - фазное напряжение двигателя; Е Ф - фазная электродвижущая сила двигателя (ЭДС); І м - намагничивающий ток двигателя. На рис.4 изображена кривая индуктивного сопротивления взаимной индукции Х m , приведенная к фазе статора, построенная по результатам опыта холостого хода.
Опытное определение рабочих характеристик МДП осуществлялось двумя методами: прямым и косвенным. При определении характеристик прямым методом величина полезного момента непосредственно считывалась со шкалы балансирной машины с учетом поправки, которая находилась опытным путем согласно . Величина полезной мощности определялась по выражению:
h= P 2 / P 1 (9)
При определении рабочих характеристик косвенным методом потери в стали и механические потери МДП принимались постоянными. Потери в меди обмоток определялись обычным способом , КПД МДП - по формуле:
|
|
h= (P 1 - SP) / P 1 (10)
Р 1 - мощность, потребляемая статором и ротором МДП;
SP - сумма потерь в МДП.
Коэффициенты мощности статора и ротора находят из выражений
cosj 1 = P 1 / (Ö3U 1 *I 1), cosj 2 = P 2 / (Ö3U 2 *I 2) (11)
Нагрузка МДП при проведении опыта изменялась при помощи резистора R1 (см. рис.1 ). При этом фиксировались напряжения, токи статора и ротора МДП, вращающий момент, подведенная к статору к ротору мощность и угол нагрузки и. Результаты исследования прямым методом представлены на рис.6 в виде основных рабочих характеристик
h= f(P 2) и cosj= f (P 2) (11)
Для удобства сравнения с обычным асинхронным режимом на рис.5,а полезная мощность двигателя дана в киловаттах, на рис.5,б - в процентах. За номинальную мощность двигателя в режиме МДП принята мощность 5,6 кВт, т.к. при этой мощности статор и ротор МДП обтекаются номинальными токами. Из приведенных основных рабочих характеристик асинхронной машины с фазным ротором следует, что серийный асинхронный двигатель в режиме двигателя двойного питания имеет значительно лучшие энергетические показатели, а именно :
1)асинхронный двигатель с фазным ротором в режиме МДП в тех же габаритах увеличивает свою мощность в два раза (с 2,8 кВт на 5,6 кВт);
2)коэффициент полезного действия (КПД) двигателя значительно возрастает (с 75,5% до 84,5%) , а коэффициент мощности двигателя в режиме МДП - с 0,76 до 0,96.
Исследования МДП на устойчивость работы показали, что она в режиме двигателя работает устойчиво во всём диапазоне нагрузок, начиная с небольшой загрузки и кончая двукратными перегрузками (Р НОМ АД = 2,8 кВт, Р НОМ МДП = 5,6 кВт, Р mах МДП =11,7 кВт, и mах =42°).Достижение расчётной перегрузки (Р mах МДП = 16,8 кВт) ограничивалось возможностью тормозного устройства.
Толчкообразный наброс нагрузок, даже выше номинальной, не выводит МДП из синхронного режима работы. То же самое можно сказать при внезапном сбросе нагрузки с МДП .
Испытания на устойчивость работы МДП выявили также, что время успокоения её колебаний при набросе нагрузки значительно меньше времени успокоения при сбросе. Это подтверждает теоретические выводы о том, что МДП при работе на холостом ходу более близка к неустойчивому состоянию. Снижение напряжения питающей сети и работа МДП на холостом ходу приводит к возникновению колебаний (качаний), так что при этих условиях работу их нужно считать неустойчивой. Очевидно, что именно этим явлением и объясняется распространённое мнение о склонности МДП к незатухающим колебаниям. Небольшая загрузка (до 0,1 Р НОМ для исследуемого двигателя типа АК-52-6) полностью устраняет колебания и МДП работает устойчиво - без качаний и выпадения из синхронного режима работы.
Выводы
1. Проведенные экспериментальные исследования серийного асинхронного двигателя типа АК-52-6 с фазным ротором при работе в режиме двойного питания при двойной синхронной скорости, т.е. в режиме машины двойного питания (МДП), подтверждают высокие технико-экономические показатели этого класса машин. Они имеют высокий КПД, превышающий КПД обычного режима, что объясняется отсутствием у этих машин вторичных потерь (потери во вторичной обмотке трансформатора, потери в роторе асинхронного двигателя, потери на возбуждение синхронной машины). У МДП вторичных потерь по принципу работы вообще нет, т.к. статор и ротор являются первичными, обмотки которых подключены непосредственно к одной общей сети.
2. МДП отличаются высокими значениями коэффициента мощности (cosj), что связано с совместным действием двух систем питания по созданию общего магнитного потока машины.
3. МДП развивает двойную мощность по сравнению с асинхронной машиной в тех же габаритах и имеет двойную синхронную скорость вращения при промышленной частоте 50 Гц, что позволяет получить одну не стандартную скорость вращения, равную 2000 об/мин.
4. Установлено, что МДП практически при любых нагрузках могут работать устойчиво. Это подтверждают и осциллограммы сброса и наброса нагрузки при работе МДП.
Переходные процессы у МДП, связанные с изменением нагрузки, - периодические и точно так же, как и у обычных синхронных машин, они - затухающие.
При понижении напряжения питающей сети и работе МДП на холостом ходу, возникают колебания (качания), так что при этих условиях работу их нужно считать неустойчивой.
5. Качество рабочих характеристик, возможность устойчивой работы обычных серийных асинхронных двигателей с фазным ротором в режиме МДП показали, что этот класс электрических машин может служить компактным и экономичным преобразователем энергии. Он применяться практически не только в качестве высокоскоростного привода (n =6000 об/мин) при промышленной частоте 50 Гц, но и при обычных стандартных скоростях вращения с получением дополнительной скорости в 2000 об/мин.
Литература:
1. Жерве Г.К. Промышленные испытания электрических машин. Госэнергоиздат, 1959.
2. Нюрнберг В. Испытания электрических машин. Госэнергоиздат, 1959
3. Коломойцев К.В. Включение синхронного генератора на параллельную работу с сетью и о машине двойного питания // Электрик. - 2004. - №10. - С.11-12.
4.Коломойцев К.В. Энергетические возможности машин двойного питания//Электрик. - 2008. - №5. - С.48.
5. Коломойцев К.В. Устройство для измерения угла нагрузки и исследования колебаний машины двойного питания при синхронной скорости // Электрик. - 2011. №11. - С.37-39.
- Специальность ВАК РФ05.09.01
- Количество страниц 400
ГЛАВА I. СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ
ЭЛЕКТРИЧЕСКИХ МАШИН КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ
1.1. Принципы построения и технические параметры электрических машин колебательного движения.
1.2. Области применения и технические требования, предъявляемые к колебательным электродвигателям.
1.3. Машины двойного питания, как наиболее общий и перспективный случай двигателя колебательного движения.
ГЛАВА И. ВОПРОСЫ ОБЩЕЙ ТЕОРИИ КОЛЕБАТЕЛЬНОГО РЕЖИМА
РАБОТЫ МАШИНЫ ДВОЙНОГО ПИТАНИЯ.
2.1. Математическая модель колебательной машины двойного питания.
2.2. Колебательный электромагнитный момент при малых частотах колебания.
2.3. Уравнение низкочастотного колебательного движения.
2.4. Критериальные оценки показателей качества машин двойного питания.
2.5. Учет изменения параметров машины при колебательном движении.
2.6. Взаимосвязь параметров МДП с геометрическими размерами при колебательном режиме работы.
ГЛАВА III. УСТОЙЧИВОСТЬ РАБОТЫ МАШИНЫ ДВОЙНОГО
ПИТАНИЯ ПРИ ПЕРИОДИЧЕСКОМ ДВИЖЕНИИ
3.1. Синхронный и асинхронный режимы работы МДП при колебательном движении.
3.2. Качественное исследование статической устойчивости колебательного электродвигателя.
3.3. Влияние параметров машины, нагрузки и функций регулирования на статическую устойчивость МДП.
3.4. Динамическая устойчивость МДП при периодическом движении
ГЛАВА IV. АНАЛИЗ И СИНТЕЗ КОЛЕБАТЕЛЬНОЙ МАШИНЫ
ДВОЙНОГО ПИТАНИЯ.
4.1. Анализ рабочих частотных, регулировочных и механических характе ристик КМДП.
4.2. Методика синтеза КМДП по динамическим показателям.
4.3. Анализ координатной точности КМДП.
4.4. Синтез колебательной машины двойного питания по энергетическим характеристикам.
ГЛАВА V. ВОПРОСЫ СХЕМНОЙ И ЭЛЕМЕНТНОЙ РЕАЛИЗАЦИИ КОЛЕБАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА НА БАЗЕ ЭЛЕКТРИЧЕСКИХ МАШИН УГЛОВОГО И ЛИНЕЙНОГО ДВИЖЕНИЯ.
5.1. Технологические системы измерения и испытания с электроприводом колебательного движения.
5.2. МДП в системах формирования асимметричных колебаний.
5.3. Колебательный электропривод с МДП в системах компенсации продольных колебаний валов автономных объектов.
5.4. Перспективы использования электропривода периодического движения в технологических процессах.
ГЛАВА VI. АНАЛИЗ РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТАЛЬНОГО
ИССЛЕДОВАНИЯ КМДП.
6.1. Испытательный стенд и регистрирующая аппаратура для исследования КМДП.
6.2. Методика экспериментального исследования электродвигателей колебательного движения.
6.3. Результаты экспериментально исследования и их анализ.
Рекомендованный список диссертаций
Исследование влияния геометрии машины двойного питания на динамические характеристики электропривода колебательного движения 2012 год, кандидат технических наук Паюк, Любовь Анатольевна
Динамика вентиляционных машин с асинхронным электроприводом при несимметрии фазных токов 2012 год, кандидат технических наук Романовский, Александр Игоревич
Разработка и исследование автоматизированных электроприводов по системе ПЧ-АД для волочильных станов и намоточных устройств стальной проволоки 2012 год, доктор технических наук Омельченко, Евгений Яковлевич
Вальцедековая машина с колебательно-вращательным электроприводом повышенной эффективности шелушения зерна 2012 год, кандидат технических наук Осипов, Ярослав Дмитриевич
Управление динамическим состоянием асинхронных электроприводов горных машин 2009 год, доктор технических наук Завьялов, Валерий Михайлович
Введение диссертации (часть автореферата) на тему «Машина двойного питания, как общий случай электродвигателя колебательного движения»
Создание управляемых колебательных комплексов и технологических установок на базе автоматизированного электропривода является в настоящее время одной из важнейших научно-технических задач. Достаточно отметить, что регулируемые механические колебания широко используются в машино- и приборостроении, горной и химической промышленности, в технике контроля и измерения. Особое место по уникальности параметров колебаний занимают такие отрасли материального производства, как строительство, текстильная промышленность, сейсмология, ядерная техника.
В настоящее время существует достаточно большое количество электроприводов и двигателей колебательного движения с различной функционально-структурной организацией. На разработку их были направлены усилия многих отечественных и зарубежных исследователей, однако, данную задачу нельзя считать пока еще полностью решенной. Так, согласно опубликованным данным, до сих пор достаточно остро стоит проблема создания экономичного управляемого колебательного электропривода (КЭП) средней мощности с минимальным числом ступеней преобразования параметров движения. Практически отсутствуют технические решения и научно обоснованные рекомендации, позволяющие на "ходу", в течение технологического процесса, программно регулировать форму закона колебаний, осуществлять автономное регулирование частоты или усилия [ 184].
Проводимые в этом направлении исследования, связанные с разработкой принципиально новых технологических решений неизбежно приводят к усложнению создаваемого привода, синтезу новых законов управления, возрастанию сложности решения задачи обеспечения высоких статических и динамических показателей КЭП.
Одним из перспективных направлений решения указанной проблемы является построение колебательных комплексов на основе электрических машин вращательного и линейного движения, работающих в режиме колебаний.
Так, в частности, колебательные электроприводы на базе асинхронных электрических машин позволяют обеспечить практически весь потребный диапа
1 3 зон создаваемых ими регулируемых параметров колебаний: 10" -ьЗ-10 мм и 10"1 104 градусов по амплитуде; 10"" ^ 4-104 Гц по частоте; 10"" 10^ м/с2 и
5-10" -т-10 рад/с по ускорению, что, как известно, превосходит эксплуатационно-технические характеристики управляемых электродинамических и электрогидравлических вибраторов, вместе взятых .
Возрастающая тенденция к дальнейшему повышению удельной мощности колебательного электропривода при сохранении высокой его управляемости привела к тому, что в последние годы особое значение приобретают требования, предъявляемые к функциональным и энергетическим возможностям самой электрической машины, как источника колебательного перемещения или усилия. Значительный прогресс в этой области может быть достигнут за счет реализации КЭП на базе электрической машины двойного питания (МДП), работающей непосредственно в режиме периодического реверса. Использование МДП в качестве исполнительного двигателя позволяет существенно расширить функциональные возможности технологических установок, улучшить не только энергетические, но и динамические показатели колебательных комплексов, получить качественно новые характеристики привода .
Вопросам общей теории электродвигателей вращательного и линейного движения, работающих непосредственно в режиме колебаний, посвящено достаточно много работ. Некоторые задачи вышеизложенной проблемы уже решены в той или иной степени . Однако, выводы по работам основаны на ограниченном фактическом материале и касаются в основном маломощных асинхронных машин с полым ротором. Отсутствие углубленного исследования и обобщения комплекса вопросов расчетно-теоретического и научно-практического характера, составляющих научно-техническую базу, необходимую для разработки, создания и применения высоко эффективных исполнительных двигателей в составе безредукторного колебательного электропривода существенно сдерживает развитие последних.
Решению этой проблемы и посвящена данная диссертационная работа.
Диссертация выполнена на кафедре электрооборудования и электротехники Томского политехнического университета (ТПУ) и обобщает результаты научных исследований автора в период с 1975 -г 2001г. Работа проведена в соответствии с комплексной научно-технической программой "Оптимум" МВ и ССО СССР по приказу N339 от 17.04.80г. и включена в план важнейших работ ТПУ.
Цель работы состоит в решении основных вопросов общей теории электрических машин двойного питания вращательного и линейного движения, работающих в режиме колебаний, и разработке на ее основе инженерно-практических рекомендаций по расчету, проектированию и созданию как электродвигателей, так и электроприводов колебательного движения.
Реализация поставленной цели достигается решением следующих задач:
1. Математическое описание обобщенной модели электродвигателя колебательного движения и разработка на ее основе рациональных методов исследования.
2. Разработка общей методики и получение соотношений для расчета рабочих характеристик электродвигателя колебательного движения.
3. Развитие теории исследования, анализа и синтеза электродвигателей колебательного движения по энергетическим, динамическим и точностным показателям.
4. Анализ статической и динамической устойчивости машины двойного питания при периодическом движении.
6. Создание алгоритмов управления и разработка на их основе новых принципов построения специализированных колебательных комплексов на базе электрических машин переменного тока.
7. Экспериментальное исследование в лабораторных и промышленных условиях образцов колебательных электроприводов различного целевого назначения.
Методы исследования включают методы интегрального, дифференциального, операционного и комплексного исчислений, теории автоматического управления, математического моделирования и экспериментального исследования.
Научная новизна диссертационной работы заключается в том, что впервые сформулирована и решена крупная научная проблема исследования и проектирования безредукторных колебательных электроприводов углового и линейного движения на базе электрических машин переменного тока, работающих в режиме колебаний, включающая в себя развитие общей теории анализа и синтеза электрических машин колебательного движения по энергетическим, динамическим и точностным показателям, исследования статических и динамических характеристик колебательных электроприводов с машиной двойного питания, разработку новых алгоритмов управления, позволяющих существенно расширить эксплуатационные и функциональные возможности управляемых колебательных комплексов в целом.
В частности:
1. На основе анализа процессов энергообмена, углубленного изучения процессов режима вынужденных колебаний построена математическая модель электродвигателя колебательного движения и разработана методика рационального аналитического исследования ее.
2. Получены общие соотношения для расчета и анализа рабочих характеристик обобщенного колебательного электродвигателя при фазовой модуляции питающих напряжений.
103. Построена система показателей качественной и количественной оценки эффективности работы машины двойного питания в колебательном режиме.
4. Проведены исследования статических и динамических характеристик электродвигателей колебательного движения, получены зависимости показателей качества КЭП от параметров двигателя, питания и нагрузки.
5. Исследованы вопросы статической и динамической устойчивости МДП и разработаны методики их качественной оценки при периодическом движении.
6. Разработаны алгоритмы синтеза закона управления МДП, обеспечивающие высокие энергетические и точностные показатели колебательных комплексов.
Практическая ценность результатов определяется следующим:
1. Разработаны новые схемные решения, защищенные патентами и авторскими свидетельствами, обеспечивающие значительное повышение эффективности использования электрических машин переменного тока в составе управляемых безредукторных колебательных электроприводов углового и линейного движения.
2. Получен комплекс алгоритмов, математических и программных средств, позволяющих существенно сократить время и повысить качество расчетов рабочих характеристик электродвигателей колебательного движения.
3. Разработаны новые схемотехнические решения, позволяющие программно и "на ходу" регулировать частоту, амплитуду и форму выходных колебаний исполнительных двигателей.
5. Созданы основы проектирования безредукторных КЭП с электрическими машинами переменного тока при линейно-фазовой модуляции питающих напряжений.
Апробация работы. Основные результаты диссертационной работы докладывались и получили одобрение на научно-техническом семинаре "Аппаратура для виброиспытаний и анализа частотных характеристик промышленных объектов" (г. Ленинград, ЛДНТП, 1982г.), на IV и VI Всесоюзных научно-технических конференциях "Динамические режимы работы электрических машин и электроприводов" (г. Днепродзержинск, 1985г., г. Бишкек, 1991 1 г.), на краевых научно-технических конференциях "Автоматизация электроприводов и оптимизация режимов электропотребления" и "Устройства и системы автоматики автономных объектов" (г. Красноярск, 1985 г., 1987 г., 1988 г., 1990 г., 1998 г.), на Всесоюзном научно-техническом семинаре "Опыт проектирования и производства электрических машин автономных электрических систем" (г. Ереван, 1985 г.), на VII научно-технической конференции "Электроприводы переменного тока с полупроводниковыми преобразователями", «Современные проблемы энергетики, электромеханики и электротехнологии» (г. Екатеринбург, 1986 г., 1995 г.), на Всесоюзной научно-технической конференции "Силовая полупроводниковая техника и ее применение в народном хозяйстве" (г. Запорожье, 1985 г.), на 1-ой Дальневосточной научно-практической конференции "Совершенствование электрооборудования и средств автоматизации технологических процессов промышленных предприятий" (г. Комсомольск-на-Амуре, 1986 г.), на научно-техническом семинаре "Следящие электроприводы промышленных установок, роботов и манипуляторов" (г. Миасс, 1989 г.), на VI Совещании "Электрические виброимпульсные системы" (г. Новосибирск, 1987 г.), на Всесоюзной научно-технической конференции "Методы управления системной эффективностью функционирования электрофицированных и пилотно-навигационных комплексов (г. Киев, 1991 г.), на научно-практической конференции "Проблемы энергосбережения в автономных электроэнергосистемах" (г. Севастополь, 1991 г.), на Всесоюзном научно-техническом совещании "Регулируемые электродвигатели переменного тока" (г. Владимир, Суздаль, 1987 г.), на Всесоюзном научно-технической конференции «Автоматизация и прогрессивные технологии» (г. Новоуральск, 1999 г.), на ряде региональных конференций, а также на научных семинарах кафедр "Электрооборудование и электротехника" и "Электрические машины и аппараты" Томского политехнического университета в 1981 н- 2000 г.г.
Публикации. По основным результатам выполненных исследований получено 10 авторских свидетельств СССР и 2 патента России, опубликовано две монографии, а также более 60 работ в научно-технических изданиях.
Реализация в промышленности. Результаты диссертационной работы использованы при выполнении ряда научно-исследовательских тем. Научные рекомендации и технические предложения автора легли в основу создания образцов инфранизкочастотных калибровочных вибростендов для градуировки средств измерения угловых параметров движения, используемых в лаборатории угловых параметров НПО ВНИИМетрологии им. Д.И. Менделеева г. Ленинграда; испытательных вибростендов серии "ВЛАД", выполненных на базе электродвигателей линейного движения для экспресс- испытаний на вибрацию электронной аппаратуры на Рязанском заводе электронных приборов; управляемых колебательных электроприводов серии "ОПТИМУМ" : "ОПТИМУМ-01", разработанного по заказу Томского научно-исследовательского, проектно-конструкторского и технологического кабельного института (ТомНИКИ) НПО "Сибкабель" для испытания кабельных изделий; "ОПТИМУМ-02", используемого в составе гидродинамического испытательного комплекса ПО "Авиазавод" г. Воронежа; "ОПТИМУМ-ОЗ" и "ОПТИМУМ-03-1", выполненных по заказу НИСКБ "Спектр" ПО СМП г. Северодвинска Архангельской области для активной компенсации пульсирующих усилий валопроводов автономных объектов и виброакустических испытаний и контроля В АХ амортизирующих конструкций; "ОПТИМУМ-04" и ""ОПТИМУМ-05", предназначенных для формирования угловых и линейных асимметричных колебаний при работе в.составе вибротранспортных устройств снаряжения тепловыделяющих элементов АЭС, разработанных по заданию предприятия СвердНИИХиммаш г. Свердловска; "ОПТИМУМ-Об", выполненный по заказу Златоустовского машиностроительного завода ОАО «Булат» для формирования асимметричных законов колебания в сварочной установке трением.
Разработанные автором методики расчета электромеханических систем с фазовой модуляцией используются в учебном процессе при изучении студентами специальности 18.11.00 (Электрооборудование) курса "Расчет и проектирование авиационного следящего привода".
Структура диссертации. Диссертационная работа содержит 239 страниц машинописного текста, 91 рисунок, 41 фотографию, 17 таблиц и состоит из введения, шести глав, заключения, списка литературы, включающего 309 наименования и приложений на 62 страницах.
Похожие диссертационные работы по специальности «Электромеханика и электрические аппараты», 05.09.01 шифр ВАК
Обоснование режимов работы вибрационной щековой дробилки с авторезонансным электроприводом маятниковых вибровозбудителей возвратно-вращательного движения 2010 год, кандидат технических наук Гаврилов, Юрий Александрович
Повышение эффективности технологических машин в АПК применением линейного асинхронного электропривода с накопителями механической энергии 2006 год, доктор технических наук Аипов, Рустам Сагитович
Разработка и исследование электропривода стенда для испытания вертолётных трансмиссий 2012 год, кандидат технических наук Холин, Андрей Владимирович
Создание и исследование электроприводов машин средств малой механизации с полупроводниковыми преобразователями частоты 2007 год, доктор технических наук Присмотров, Николай Иванович
Вентильные двигатели с искусственной коммутацией: Теория, разработка, исследование и использование в электроприводе 2005 год, доктор технических наук Высоцкий, Виталий Евгеньевич
Заключение диссертации по теме «Электромеханика и электрические аппараты», Аристов, Анатолий Владимирович
1. Разработанный экспериментальный стенд имеет достаточно универсальный характер и может быть использован для исследования всех основных характеристик электродвигателей углового и линейного колебательного движения.
2. Экспериментально доказано, что основной вклад в искажение закона колебания вносят гармонические составляющие фазных напряжений с одинаковым порядковым номером.
3. Подтверждено, что при наличии сухого трения зарезонансный режим работы КЭП обеспечивает наименьший коэффициент нестабильности двигателя.
4. Выбор способа регулирования выходных параметров двигателя позволяет формировать требуемые кинематические и силовые характеристики в широком частотном и амплитудном диапазоне, что дает возможность реализовать различные модификации управляемых колебательных комплексов на базе управляемых машин переменного тока.
5. Проведенные эксперименты подтверждают правильность полученных теоретических результатов, их пригодность для инженерных расчетов, проектирования и создания практических схем колебательных электроприводов.
302 -ЗАКЛЮЧЕНИЕ
Исследование особенностей работы электрических машин периодического движения в составе колебательных электроприводов различного целевого назначения, определение путей дальнейшего повышения эффективности их применения представляет в настоящее время одну из важнейших современных проблем, решение которой является новым шагом на пути совершенствования производственного процесса.
Последнее невозможно без дальнейшего углубленного развития теории исследования и синтеза электрических машин колебательного движения, в частности, электрической машины двойного питания, представляющей собой в теоретическом плане наиболее общий случай электрической машины переменного тока.
Разработанная в настоящей диссертации общая теория электродвигателей углового и линейного движения, работающих непосредственно в режиме периодического реверса позволила получить некоторые принципиально новые инженерно практические рекомендации по расчету, проектированию и созданию электродвигателей колебательного движения. Основные результаты исследований достаточно глубоко обобщены и могут быть распространены на любые типы электродвигателей как переменного, так и постоянного тока, что позволяет на этапе проектирования оценить возможности и приоритеты их применения в составе колебательных комплексов.
Полагая, что результаты исследований достаточно полно сформулированы в выводах, сопровождающих каждую главу, в заключении отмечаются лишь наиболее важные из них, имеющие принципиальное значение.
1. На основе анализа современного состояния и перспектив использования электрических машин переменного тока в составе колебательных электроприводов определены актуальные задачи по их дальнейшему усовершенствованию с целью удовлетворения возрастающих требований, предъявляемых различными отраслями народного хозяйства. Предложены методы повышения эффективности и расширения функциональных возможностей электромашинных безредукторпых колебательных комплексов, в частности, за счет использования в качестве исполнительного элемента - машины двойного питания.
2. Впервые на основании математического описания обобщенной модели электрической машины двойного питания, разработана общая теория электрических машин переменного тока, работающих в режиме периодического реверса при фазовом способе возбуждения колебательного режима работы. В результате создана общая методика и получены рациональные инженерные соотношения (4.2, 4.3, 2.46, П 2.5) для расчета рабочих характеристик электродвигателя колебательного движения в установившихся и переходных режимах.
3. Построена система показателей качества и количественной оценки эффективности использования электрических машин в колебательном режиме, позволяющая с учетом выражений 4.7, 4.10, 4.11, 4.21, 4.25, 4.27+4.30 производить анализ и синтез колебательных комплексов по динамическим, энергетическим и точностным характеристикам.
4. Впервые сформулированы понятия синхронного, квазисинхронного и асинхронного режимов работы электрической машины при периодическом движении. Рассмотрены и исследованы вопросы статической и динамической устойчивости МДП при совершении колебательного движения. На основании полученных результатов даны практические рекомендации по более эффективному использованию электрических машин переменного тока в составе КЭП.
5. Теоретически и экспериментально исследованы установившиеся и переходные режимы МДП колебательного движения. Результаты теоретического исследования сформулированы в виде критериальных зависимостей, выраженных аналитически и графически, что открывает возможности не только качественного, но и простого количественного анализа связей электрической машины, нагрузки и источников питания. Показано, что расчет и проектирование КЭП следует осуществлять по рабочим характеристикам с учетом обеспечения заданных алгоритмов управления (табл. 4.5-^4.6), руководствуясь следующими положениями:
Наибольшее влияние на статические и динамические характеристики МДП оказывает величина активного сопротивления обмоток вторичного элемента, определяя знак и величину коэффициента электромагнитного демпфирования двигателя. Варьирование им позволяет синтезировать колебательный электропривод переменной структуры "источник перемещения" - "источник усилия". Увеличение активного сопротивления обмоток вторичного элемента снижает значения ударных токов, повышает статическую и динамическую устойчивости МДП, однако при этом ухудшаются энергетические показатели колебательно двигателя;
Обеспечение максимальной выходной мощности КЭП наблюдается в области около резонансного режима работы двигателя, а обобщенного коэффициента полезного действия - в резонансном. Выбор заданного режима с учетом параметров нагрузки и функций регулирования осуществляется на основании анализа позиционной электромагнитной составляющей колебательного момента электродвигателя, величина которой существенным образом зависит от индуктивностей рассеяния обмоток вторичного элемента или коэффициента взаимоиндуктивности;
Коэффициент позиционного электромагнитного момента определяет качество амплитудно- фазочастотных характеристик электродвигателя колебательного движения и позволяет в зависимости от способа регулирования изменять свой знак, воздействуя на параметры системы, внося как положительную, так и отрицательную фиктивные жесткости;
Обеспечивая высокие энергетические показатели, резонансный режим работы МДП характеризуется максимальным временем переходного процесса и при нестабильности нагрузки оказывает наиболее сильное влияние на фазовые характеристики КЭП, увеличивая координатную ошибку системы в делом;
Для обеспечения наибольшей координатной точности колебательного электродвигателя следует проектировать работу КЭП в зарезонансном режиме, предъявляя наиболее жесткие требования к стабильности по частоте источников питания, причем последние должны обеспечивать рекуперацию энергии в генераторном режиме работы электрической машины.
6. Разработанные методы совершенствования и расширения функциональных возможностей электромашинных колебательных электроприводов с учетом их целевого назначения могут быть реализованы как на основе модификаций базовых конструкций электрических машин общепромышленного применения, так и путем создания новых типов электрических машин специально для конкретно разрабатываемых технологических установок. В результате значительно повышается эффективность использования колебательных электродвигателей не только в традиционных областях их предпочтительного применения, но и в тех областях, где ранее по эксплуатационным характеристикам они были неконкурентноспособными в сравнении с другими видами двигателей периодического движения.
7. Опыт разработки, создания и внедрения практических схем с электродвигателями колебательного движения убеждает в том, что использование в качестве силового элемента привода машины двойного питания позволяет при прочих равных условиях улучшить энергетические показатели КЭП в 1,2 ^ 1,6 раза. Динамические показатели электрической машины в режиме МДП намного превышают режим АД за исключением времени переходного процесса, а при наличии позиционной нагрузки становятся соизмеримыми и по последнему показателю. Режим АД может быть рекомендован для получения больших амплитуд колебаний при работе в инфранизком частотном диапазоне, а также в системах, где в разомкнутых колебательных электроприводах необходимо обеспечить координатную точность не хуже 1%.
8. Накоплен и обобщен опыт практической реализации и эксплуатации безредукторных колебательных электроприводов на основе электрических машин разных типов и назначения, освещающий инженерно-технические аспекты эффективного формирования механических колебаний, непосредственно на валу исполнительного двигателя.
9. Научные разработки автора и технические решения, защищенные патентами и авторскими свидетельствами, использованы при создании ряда опытных образцов колебательных электроприводов различного функционального назначения, что подтверждается соответствующими документами, представленными в приложении.
Список литературы диссертационного исследования доктор технических наук Аристов, Анатолий Владимирович, 2001 год
1. Абрамович C.B. Численные и функциональные ряды. Новочеркасск. 1963. -70 с.
2. Авдзейко В.И. Источники питания скваженной аппаратуры: Автореф. дис. канд. техн. наук. Томск. ТПИ. 1984.
3. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых микросхем. М.: Радио и связь. 1985-255с.
4. Андреев В.Е. и др. Исследование колебаний биморфных пьезоэлектрических преобразователей // Тр. Ленингр-го караблестроит. ин-та. 1972. Вып.83. С. 74-76.
5. Антипенко Н.И. Исследование работы АД в автоколебательном режиме // Автоматика. 1963. N4. С. 51-62.
6. Аристов A.B. Электропривод колебательного движения с машиной двойного питания. Томск: Издательско-полиграфическая фирма ТПУ, 2000.-176 с.
7. Аристов A.B. Анализ динамической устойчивости МДП при периодическом движении //Электромеханические устройства и системы: Межвузовский сб. научных трудов. Воронеж: Воронежский институт МВД России, 1999. С. 100-105.
8. Аристов A.B., Петрович В.П., Бурулько Л.К. Координатная точность колебательного электропривода с машиной двойного питания // Вестник Красноярского ПТУ, посвященный 65-летию Б.П. Соустина, г. Красноярск, КГПУ, 1998. С. 81-84.
9. Аристов A.B., Бурулько Л.К., Аристов A.A. Электропривод колебательного движения в системах вибротранспортировки // Автоматизация и прогрессивные технологии / Под ред. A.A. Ефимова.-Новоуральск: НПИ МИФИ, 1999,-часть 2. С.232-235.
10. Аристов A.B. Безударный пуск асинхронного электродвигателя //Изв. вузов. Электромеханика. 1993. N5. С. 52-57.
11. Аристов A.B. Динамическая устойчивость машины двойного питания при периодическом движении // Рук. деп. в ВИНИТИ 17.06.94. N1507-B 94.-11 с.
12. Аристов A.B. Управляемый асинхронный колебательный привод // Исследование специальных электрических машин и машино-вентильных систем. Межвуз. сб., Томск. 1981. С. 116-120.
13. Аристов A.B. Определение закона движения асинхронного колебательного привода при полигармоническом питании с учетом сухого трения // В кн.: Электромеханика и преобразовательная техника. Томск. ТПИ. 1984. С. 128134.
14. Аристов A.B. Электромагнитные переходные процессы в электрической машине двойного питания при колебательном движении // Задачи динамики электрических машин. Омск. 1991. С. 51-54.
15. Аристов A.B. Разработка и исследование прецизионного асинхронного электропривода угловых синусоидальных колебаний: Автореф. дис. канд. техн. наук. Томск. ТПИ. 1982.
16. Аристов A.B. Статическая устойчивость машины двойного питания в режиме периодического движения // Электричество. 1994. N6. С. 55-60.
17. Аристов A.B. Синтез колебательной машины двойного питания по энергетическим характеристикам // Рук. деп. в ВИНИТИ 14.02.95. N414 -В95.-19 с.
18. Аристов A.B. Вопросы схемной и элементной реализации колебательного электропривода на базе электрических машин углового и линейного движения // Рук. деп. в ВИНИТИ 28.03.95. N 830 В95. - 85 с.
19. Аристов A.B. Низкочастотный колебательный электропривод с регулируемым законом движения//Изв. вузов. Электромеханика. 1996. N 1-2. С. 7277.
20. Аристов A.B. Вопросы исследования, разработки и практического внедрения электроприводов колебательного движения с машиной двойного питания // Современные проблемы энергетики, электромеханики и электротехнологии, ч. 2, г. Екатеринбург, 1995. С. 234-236.
21. Аристов A.B. Электропривод колебательного движения с регулируемым законом движения // Положительное решение на патент по заявке N93030885.
22. Аристов A.B. Вопросы исследования, разработки и практического внедрения электроприводов колебательного движения с машиной двойного питания //Вестник Уральского госуд. техн. университета. 1995. С. 234-236.
23. Аристов A.B., Аристова Л.И. Влияние сухого трения на закон движения подвижного элемента колебательного электропривода// Оптимизация режимов работы систем электроприводов. Красноярск. КПИ. 1984. С. 140-143.
24. Аристов A.B., Аристова Л.И. Рабочие характеристики колебательного электропривода с машиной двойного питания // Рук. деп. в ВИНИТИ 17.06.94. N 1508 В 94 - 11 с.
25. Аристов A.B., Аристова Л.И., Зиновьев Г.Г. и др. Исследование энергетических показателей калибровочных вибростендов для РЭА.// Вопросы конструирования и технологии производства РЭА. Томск. Изд-во Том. унив. 1986. С. 92-95.
26. Аристов A.B., Аристов В.В. Исследование уравнения низкочастотного колебательного движения машины двойного питания // Электротехника. 1994. N 1.С. 47-51.
27. Аристов A.B., Аристов В.В. Регулировочные характеристики электропривода колебательного движения с машиной двойного питания // Электротехника. 1994. N11. С. 28-31.
28. Аристов A.B., Зиновьев Г.Г. Координатная точность вибропривода на основе асинхронного двигателя // В кн.: Конструирование и технология производства РЭА. Томск. Изд-во Том. унив. 1982. С. 99-103.
29. Аристов A.B., Зорин П.В. Многофункциональный цифровой модулятор // Приборы и техника эксперимента. 1993. N1. С. 137-140.
30. Аристов A.B., Луковников В.И. О синхронном режиме машины двойного питания в колебательном движении.// Электричество. 1992. N8. С. 31-33.
31. Аристов A.B., Луковников В.И., Шутов Е.А. Расчет динамических индук-тивностей колебательной машины двойного питания // Задачи динамики электрических машин. Омск. 1991. С. 92-95.
32. Аристов A.B., Тимофеев A.A. Закон движения электропривода колебательного движения с машиной двойного питания.// Изв. вузов. Электромеханика. 1992. N5. С. 78-72.
33. Аристов A.B., Ткалич С.А. Колебательная машина двойного питания // Опыт проектирования и производства электрических машин автономных электрических систем. Тез. докл. Всесоюзного НТС. Ереван. 1985. С. 37.
34. Аристов A.B., Ткалич С.А. Колебательный электропривод на основе машины двойного питания с полупроводниковыми преобразователями.// Электроприводы переменного тока с полупроводниковыми преобразователями.// Тез. докл. УП НТК. Свердловск.1986. С.52.
35. Аристов A.B., Ткалич С.А., Шутов Е.А. и др. Колебательный электропривод синхронизированный с чатотой сети // Электроприводы переменного тока с полупроводниковыми преобразователями. Тез. докл. УП НТК. Свердловск. 1986. С. 53-54.
36. Аристов A.B., Ткалич С.А., Шутов Е.А. Цифровая модель колебательного электропривода // Сб.: Оптимизация режимов работы систем электроприводов. Красноярск. КПИ. 1986. С. 103-105.
37. Аристов A.B., Петрович В.П. Построение систем регулирования виброиспытательной аппаратуры // В кн.: Аппаратура для виброиспытаний и анализа частотных характеристик промышленных объектов. Л.: ЛДНТП. 1982. С. 61-63.
38. Артоболевский И.И. О машинах вибрационного действия. АН СССР. М.: 1956.-47с.
39. A.c. N 1450065 СССР. Устройство для возбуждения колебаний вала двухфазного асинхронного двигателя. / Аристов A.B. и др. // Б.И. 1989. N 1.
40. A.c. N 245879 СССР. Безконтактный двигатель постоянного тока возвратно-поступательного движения. / Овчинников И.Е.// Б.И. 1969. N20.
41. A.c. N 1251241 СССР. Синхронизированная асинхронная машина /Безверхний С.А., Луковников С.И. //Б.И. 1986. N 30.
42. A.c. N 1336165 СССР. Электрическая машина переменного тока /Безверхний С.А., Луковников С.И. //Б.И. 1987. N33.
43. A.c. N 1337968 СССР. Способ снижения потерь в асинхронном электродвигателе. / Загорский А.Е., Пар И.Т., Захарова З.А. и др. // Б.И. 1987. N34.
44. A.c. N 353248 СССР. Способ задания колебательных движений вала АД. / Луковников В.И., Госьков П.И. // Б.И. 1972. N 29.
45. A.c. N 653712 СССР. Вибрационный электропривод. / Луковников В.И. и др.//Б.И. 1979. N 11.
46. A.c. N 87770 СССР. Вибрационный электропривод. / Луковников В.И. и др. //Б.И. 1981. N40.
47. A.c. N 1179513 СССР. Вибрационный электродвигатель. / Аристов A.B., Грачев С.А., Луковников В.И. и др. П Б.И. 1985. N 34.
48. A.c. N 714609 СССР. Устойство для управления двухфазным асинхронным двигателем. / Грачев С.А., Луковников В.И. и др. // Б.И. 1980. N 5.
49. A.c. N 756586 СССР. Устройство для возбуждения колебаний вала двухфазного асинхронного электродвигателя. / Грачев С.А. и др. // Б.И. 1980. N 30.
50. A.c. N 1453577 СССР. Устройство для управления двухфазным асинхронным двигателем в режиме колебательного движения. / Аристов A.B. и др. // Б.И. 1989. N 3.
51. A.c. N 1307530 СССР. Электропривод колебательного движения. /Аристов A.B. и др. // Б.И. 1987, N 16.
52. A.c. N 1775835 СССР. Электропривод колебательного движения. /Аристов A.B. и др.//Б.И. 1992. N42.
53. A.c. N 1503650 СССР. Колебательный электропривод. / Аристов A.B., Нуриев З.К., Ткалич С.А. // Б.И. 1989. N31.
54. A.c. N 1412554 СССР. Способ управления параметрами синусоидальных колебаний двухфазного асинхронного двигателя. / Аристов A.B., Луковни-ков В.И. и др.// Б.И. 1988. N 27.
55. A.c. N 1180317 СССР. Вибрационный питатель. / Повидайло В.А. // Б.И. 1985.N35.
56. A.c. N 533527 СССР. Вибропривод бигармонических колебаний / Клепиков СИ., Камышный Н.И., Сапожников Б.И.//Б.И. 1976. N40.
57. A.c. N 1317636 СССР. Способ управления двухфазным асинхронным двигателем в режиме прерывистого движения / Ткалич С.А., Аристов A.B., Шутов Е.А.// Б.И. 1987. N 22.
58. A.c. N 1180208 СССР. Машина для сварки трением. / Белошапкин Г.В. и др.//Б.И. 1985. N35.
59. A.c. N 10002120 СССР. Способ сварки трением. / Белошапкин Г.В. и др. // Б.И. 1983. N9.
60. A.c. N 1741249 СССР. Электропривод колебательного движения. / Аристов А-.В. и др. //Б.И. 1992. N22.
61. A.c. N 987753 СССР. Асинхронный электродвигатель колебательного движения. / Аристов A.B., Малофиенко С.Г., Гусев A.M. и др. // Б.И. 1983. N 1.
62. A.c. N1363392 СССР. Вибропривод. / Нитусов Ю.Е., Коцюбинский А.И., Гасымов P.A. II Б.И. 1987. N48.
63. A.c. N888289 СССР. Вибратор. / Рухлядев A.A., Костиков Н.И., Мамонтов H.H. // Б.И. 1981. N45.
64. A.c. N1394348 СССР. Электродвигатель возвратно-поступательного движения Булата Гуцала. / Булат Л.П., Гуцал Д.Д. // Б.И. 1988. N17. .
65. A.c. N1374359 СССР. Вибратор. / Хайруллин И.Х., Тимершин Ф.Г.,Файзуллин Р.Д. // Б.И. 1988. N6.
66. A.c. N1358048 СССР. Вибратор. / Костиков H.H., Мамонтов H.H., Токарева И.Б., Маслов A.A. // Б.И. 1987. N45.
67. A.c. N1279024 СССР. Магнитный вибратор. / Костиков Н.И., Мамонтов H.H., Регульский H.H. // Б.И. 1986. N47.
68. A.c. N1274082 СССР. Вибропривод. / Усенко H.A., Ивлев В.В., Свинаренко Л.А. //Б.И. 1986. N44.
69. A.c. N1251245 СССР. Электродвигатель возвратно-поступательного движения. / Литвиненко A.M. //Б.И. 1986. N30.
70. A.c. N1424103 СССР. Электромагнитный двигатель возвратно-поступательного движения. / Ряшенцев Н.П., Малинин В.И., Ряшенцев А.Н. //Б.И. 1988. N34.
71. A.c. N535196 СССР. Гидравлический вибратор. / Варсанофьев В.Д., Кузнецов О.В., Голоденко В.Д. и др. // Б.И. 1976. N 42.
72. A.c. N698077 СССР. Вибродвигатель. / Курыло Р.Э., Маркаускайте Г.К. и др.//Б.И. 1979. N42.
73. A.c. N721887 СССР. Вибродвигатель. / Курыло Р.Э., Акялис М.Э., Рагуль-скис K.M.//Б.И. 1980. N 14.
74. A.c. N743082 СССР. Вибродвигатель. / Бекша Г.-В.Л., Васильев П.Е., Климавичюс П.-А.Р. // Б.И. 1980. N 23.
75. A.c. N1108343 СССР. Устройство для управления электрогидравлическим вибратором. / Борисов А.Л., Цуканов Н.В. // Б.И. 1984. N 30.
76. A.c. N1144016 СССР. Электродинамический вибростенд. / Остроменский П.И., Поташов A.A. // Б.И. 1985. N 9.-31478. A.c. N1026400 СССР. Гидравлический вибратор. / Юткин JI.A., Польцова Л.И.//Б.И. 1983. N33.
77. A.c. N1379667 СССР. Электрогидравлический вибростенд. / Рогожкин М.В., Богуцкий В.В. и др. // Б.И. 1988. N9.
78. A.c. N299339 СССР.- Усройство для вибрационной обработки деталей. / Малкин Д.Д. //Б.И. 1971. N 12.
79. A.c. N1647790 СССР. Поворотный электродвигатель колебательного движения. / Кузнецов А.Н., Широков H.A., Першин JI.H., Широков А.Н. // Б.И. 1991. N 17.
80. A.c. N1234923 СССР. Синхронно-асинхронная электрическая машина. / Безверхний С.А. //Б.И. 1986. N 20.
81. A.c. N1124404 СССР. Электрическая машина (ее варианты). / Безверхний С.А. //Б.И. 1984.N42.
82. A.c. N756586 СССР. Устройство для возбуждения колебаний вала двухфазного асинхронного двигателя. / Грачев С.А., Луковников В.И., Лезный В.Т., Малофиенко CT Л Б.И. 1980. N 30.
83. Афонин A.A., Билозор Р.Р., Бондаренко В.И. и др. Управляемые электрические машины возвратно-поступательного движения. Пробл. техн. электродинамики / Ин-т электродинамики АН УССР. 1979. Вып. 69. С.70-76.
84. Афонин A.A., Бондаренко В.И. Линейный асинхронный двигатель в качестве электропривода колеблющейся пластины.// Проблемы технической электродинамики. Киев. 1975. N58. С.71-74.
85. Афонин A.A., Гребеников В.В., Гуров С.Д. Расчет динамических характеристик электромагнитного двигателя возвратно-поступательного движения.// Рук. деп. в ВИНИТИ N 5076 В87.- 15 с.
86. Бабичев Ю.Е. Машины двойного питания с соединением обмоток статора и ротора // Электрическая промышленность. Электропривод. 1974. Вып. 7(33). С. 9-11.
87. Бабичев А.П. Вибрационная обработка деталей. М.: Машиностроение.1974.-134 с.
88. Барыкин К.К., Казадиев А.П. Возбуждение низкочастотных колебаний с помощью линейных двигателей // Вопр. теории и проектир. электрических машин: Электрониз. двигателей спец. назначения Саратов. 1988. С. 80-84.
89. Башлыков В.А. Теоретические предпосылки к разработке генератора механических колебаний на базе АДП // Тр. ЧПИ. Челябинск. 1972. N 108. С. 26-28.
90. Беляев Е.Ф., Шулаков Н.В. Математическое моделирование динамических режимов линейных индукционных машин с коротким рабочим телом // Вестник Уральского госуд. техн. университета. 1995. С. 28-31.
91. Белый Н.П. и др. Установки и способы испытаний агрегатов авиационных конструкций на вибрационную выносливость // Усталостная прочн. и дол-говечн. авиаконструкций. Куйбышев. 1974. Вып. 1. С. 81-94.
92. Берозашвили Г.В., Маглакелидзе Т.А. Динамика привода виброустановки напрессовки подшипников на вал ротора // Технология машин малой мощности. 1976. N 5. С.23-32.
93. Бинс К.,Лауренсон П. Анализ и расчет электрических и магнитных полей. М.: Энергия. 1971. 376 с.
94. Бирюк Н.Д., Дамгов В.Н. Анализ колебаний в нелинейном контуре методом комплексных амплитуд // Электричество. 1988. N 8. С. 46-51.
95. Блоцкий H.H., Лабунец И.А., Шакарян Ю.Г. Машины двойного питания. Итоги науки и техники. Электрические машины и трансформаторы. Том 2. М.: ВИНИТИ. 1979.-122 с.
96. Блоцкий H.H. Электромагнитные процессы в преобразователе частоты с непосредственной связью // Труды ВНИИЭ. 1972. N 41. С. 119-144.
97. Ботвинник М.М., Шакарян Ю.Г. Управляемая машина переменного тока. М.: Наука. 1969. 140 с.
98. Боязный Я.М., Кузьменко В.В., Сальников Ю.К. Вибрационный кабеле-укладчик для бестраншейной прокладки кабеля //Тр. ВНИИПЭМ / Всесоюз. научно-иссл. и проект, ин-т "ВНИИ проектэлектромонтаж". 1978. Вып. 5. С. 3-10.
99. Брагинская Н.В. Электропривод автоколебательного беспружинного вибровозбудителя // Тр. Всесоюз. начн. иссл. ин-та строит, и дорожного машиностроения. 1973. N 62. С. 9-13.
100. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. М.: Наука. 1986,- 544 с.
101. Брынский Е.А., Данилевич Я.Б., Яковлев В.И. Электромагнитные поля в электрических машинах. Л.: Энергия. 1979. 176 с.
102. Быховский И.И. и др. Вибрационные машины в строительстве и производстве строительных материалов. Справочник. Под ред.Баумана В.А. М.: Машиностроение. 1970. 576 с.
103. Быховский И.И., Попов С.И. Автоматическая стабилизация резонансных машин. М.: ЦНИИТЭстроймаш. 1972. 120с.
104. Булгаков Б.В. Колебания. М.: Гостехиздат. 1954. 892 с.
105. Важнов А.И. Основы теории переходных процессов синхронных машин. М.: Госэнергоиздат. 1960. 312 с.
106. Васильева Р.В., Цеханский K.P., Фридлянд В.И., Баракин H.A. Портативный калибровочный вибростенд для контроля турбоагрегатов. типа ВКЭ-1 // Тр. ЦНИИТмаш / ЦНИИ технологии машиностроения. 1978. N 146. С. 108-115.
107. Ваупшас Й.Й. Исследование синхронного двигателя качательного движения: Автореф. дис. . канд. тех. наук. ЛПИ. 1980.-317111. Веселовский О.Н., Коняев Ю.А., Сарапулов Ф.Н. Линейные асинхронные двигатели. М.: Энергоатомиздат. 1991. 256 с.
108. Вольдек А.И. Электрические машины. Л.: Энергия. 1974.- 839 с.
109. Воронов A.A. Переменные электрические токи в применении к распределению энергии. Петроград. 1915.-513 с.
110. By Жа Хань. Исследование влияния насыщения на динамику пуска асинхронного двигателя // Электротехника. N 8. 1967. С.45-47.
111. Галкин И.Н. Проблемы вибрационного просвечивания Земли // Изв. АН СССР. Физика Земли. 1977. N2. С. 102-103.
112. Генкин М.Д., Русаков A.M., Яблонский В.В. Электродинамические вибраторы. М.: Машиностроение. 1975. 94с.
113. Генкин М.Д. и др. Продольные колебания валопроводов судовых паротурбинных установок. М.: Наука. 1976. 174 с.
114. Гладков С.Н. Электромеханические вибраторы. М.: Машиностроение. 1966. 83с.
115. Глуховский Л.И. Исследование и расчет на ЦВМ параметров установившихся режимов и характеристик насыщенных явнополюсных синхронных машин: Автореф. дис. .канд. техн. наук. Львов. ЛПИ. 1970.
116. Голован А.Г., Чжан Чен-Шен. Механическое качание асинхронной машины при ее работе с последовательно включенными конденсаторами // Электричество. 1962. N10. С.12-15.
117. Горев A.A. Переходные процессы синхронной машины. M.-JL: Госэнер-гоиздат. 1950. 551 с.
118. Госьков П.И., Луковников В.И. Исследование установившихся режимов работы колебательного двигателя в оптико-электронных сканирующих системах // Тез. докл. н.т.к. молодых ученых и специалистов. ТПИ. Томск. 1968. С.75-76.
119. Гохберг С.М. Синхронные режимы работы трехфазной индукционной машины при двойном питании от одной и той же сети // Электричество. N 8. 1925. С.447-454.
120. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и произведений. М.: Физматгиз. 1963. 1100с.
121. Грачев С.А. Исследование динамики специальных режимов работы асинхронных электродвигателей: Автореф. дис. канд. техн. наук. Томск. ТПИ. 1975.
122. Грузов Л.Н. Методы математического исследования электрических машин. М.-Л.: Госэнергоиздат. 1953. 264 с.
123. Давыдов Н.И., Дудникова И.П., Дудников С.Г., Мельников Б.И.Методика экспериментального определения частотных характеристик промышленных объектов регулирования // Теплотехника. 1956. N9. С.35-42.
124. Дадунашвили С.Ш., Хвингия М.В. Вопросы расчета машин с электромагнитными вибровозбудителями. М.: Вибрацион. техн. 1980. С.122-126.
125. Дацковский Л.Х., Тарасенко Л.М., Кузнецов И.С., Бабичев Ю.Е. Синтез систем подчиненного регулирования в асинхронных электроприводах с непосредственными преобразователями частоты // Электричество. 1979. N 9. С. 48-56.
126. Демирчян К.С. Моделирование магнитных полей. М. Л.: Энергия. 1974. -200с.
127. Джонсон Д., Джонсон Дж., Мур Г. Справочник по активным фильтрам. М.: Энергоатомиздат. 1983. 128 с.
128. Домбровский В.В. Справочное пособие по расчету электромагнитного поля в электрических машинах. Л.: Энергоатомиздат. 1983. 255 с.
129. Дъяков В.И., Фролов А.Н. Расчет и анализ статических и механических характеристик ЛАД//Электричество. 1978. N12. С. 67-70.
130. Евстигнеев Л.Ф. Маломощный асинхронный электродвигатель, управляемый подмагничиванием током переменной частоты: Автореф. дис. канд. техн. наук. Горький. 1969.
131. Забродин В.А. и др. Контроль и регулирование виброобкатки //Механизация и автоматизация производства. 1975. N10. С.35-36.
132. Загайко М.Г. Теоретическое и экспериментальное исследование работы круглых вибрационных решет, совершающих винтовые колебания при очистке риса и других культур. Автореф. дис. канд. техн. наук. Харьков. 1970.
133. Загорский А.Е., Шакарян Ю.Г. Управление переходными процессами в электрических машинах переменного тока.-М.: Энергоатомиздат, 1986. -176с.
134. Захаров Ю.Е. Исследование гидравлических и электрогидравлических вибраторов: Автореф: дис. . докт. техн. наук. М. МВТУ. 1974.
135. Змага О.П. О рациональном электроприводе вибрационных зерноочистительных машин II Тр. Московс. ин-та инж. сельс. произв. 1973. Т. 10. Вып. 2. С. 89-96.
136. Зиновьев Г.Г. Координатная точность однокоординатного сканирования: Автореф. дис. канд. техн. наук. Томск. ТПИ. 1981.
137. Зиновьев Г.Г., Луковников В.И., Аристов A.B. Закон движения сканатора асинхронной сканирующей системы разночастотного питания // Оптимизация режимов работы систем электроприводов. Красноярск. КИИ. 1981. С. 59-64.
138. Ижеля Г.И., Ребров С.А., Шаповаленко А.Г. Линейные асинхронные двигатели. Киев: Техника. 1975. 135 с.
139. Ильинский Н.Ф. Элементы теории и применение электроприводов со свойствами управляемого источника момента // Электротехника. 1974. N 10. С. 35-40.
140. Исследование и создание макета асинхронного колебательного электропривода для использования его в установках воспроизведения угловых параметров движения: Отчет о НИР / Отв. исп. Аристов A.B. N гос. регист.62-83-32/04. Томск. 1980. 35с.
141. Каасик П.Ю., Нефедов В.В., Рогачева Г.Г. Влияние высших гармоник на характер электромагнитного момента индукторного двигателя двойного питания//Рук. деп. в КазНИИНТИ 25.10.85. N 1084-Ка.- Юс.
142. Казовский Е.Я. Переходные процессы в электрических машинах переменного тока. М. Л.: Изд-во АН СССР. 1962. - 624 с.
143. Карасев И.М. Прогрессивные технологические процессы в местной промышленности. Опыт работы. М.: Легкая индустрия. 1974. -130 с.
144. Капустин Г.П. Исследование асинхронных параметрических электродвигателей малой мощности вращательного и колебательного движения: Авто-реф. дис. канд. техн, наук. Казань. 1974.
145. Касьянов В.Т. Электрическая машина двойного питания как общий случай машины переменного тока // Электричество. 1931. N21-22. С.1189-1197. С.1282-1289.
146. Кирпатовский С.И. Обоснование теории полной мощности многофазной цепи// Изв. вузов. Энергетика. 1959. N 2. С. 30-41.
147. Ковалев Ю.З., Марголенко В.В., Соломин Е.В. Об одном методе расчета динамики электропривода колебательного движения //Динамика электрических машин. Омск. 1985. С.145-149.
148. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. М.-Л.: Госэнергоиздат. 1963. 744с.
149. Кобзев A.B. Многозонная импульсная модуляция. Новосибирск: Наука. 1979. 300 с.
150. Коловский М.З. Автоматическое управление виброзащитными системами. М.: Наука. 1976. 319 с.
151. Кононенко Е.В. Синхронные реактивные машины. М.: Энергия. 1970.-208 с.
152. Копылов И.П. Электромеханические преобразователи энергии. М.:Энергия. 1973.-400с.
153. Копылов И.П. Математическое моделирование электрических машин. М.: Высшая школа. 1987. 247 с.
154. Копылов И.П., Горяинов Ф.А., Клоков Б.К. и др. Проектирование электрических машин / Под ред. И.П. Копылова // М.: Энергия. 1980. 495 с.
155. Королев Ю.В., Елисеев C.B. О возможности изменения динамических свойств механической системы путем введения дополнительных электродинамических связей // Воросы надежности и вибрационной защиты приборов. Иркутск. 1972. С. 64-67.
156. Кратинов А.Г. Магнитострикционный электровибропривод / Конструир. и пр-во транс, машин. Харьков. 1980. N12. С.124-127.
157. Крон Г. Применение тензорного анализа в электротехнике. M.-JL: Госэнергоиздат. 1955. 275 с.
158. Кудараускас С.Ю. Синхронные двигатели колебательного движения: Ав-тореф. дис. доктор, техн. наук. Москва. МЭИ. 1980.
159. Кузнецов A.A. Вибрационные испытания элементов и устройств автоматики. М.: Энергия. 1976. 106с.
160. Кулаков В.Ф., Дмитриев В.Н. Вибраторы с регулируемой амплитудой силы // Сб. Электромеханические устройства систем автоматики. Томск. 1976. С. 45-47.
161. Лавендел Э.Э. Синтез оптимальных вибромашин. Рига. Зинатне. 1970.-252 с.
162. Лайон В. Анализ переходных процессов в электрических машинах переменного тока. М. Л.: Госэнергоиздат. 1958. - 340с.
163. Левитский Н.И. Колебания в механизмах. / Учебное пособие для втузов. М.: Наука. Гл. ред. физ.-мат. лит. 1988. 336с.
164. Лейтман М.Б. Автоматическое измерение выходных параметров электродвигателей /методы и аппаратура/. М.: Энергоатомиздат. 1983. 152 с.
165. Ленк А., Ренитц Ю. Механические испытания приборов и аппаратов. М.: Мир. 1976. -270 с.
166. Липов P.C., Барыкин К.К., Самсонов В.А., Соснин Д.А. Цилиндрический ЛАД с улучшенными характеристиками // Электрооборудование авт., электр. и дор.-строит, машин. М.: 1985. С. 52-55.
167. Литвак В.И. Использование вибростендов в автоколебательном режиме для натуральных испытаний // Проблемы прочности. АН УССР. 1975. N 1. С. 81-86.
168. Лопухина Е.М., Сомихина Г.С. Асинхронные микромашины с полым ротором. М.: Энергия. 1967. 488 с.
169. Лосьев В.М. Перспективы развития современных методов и средств вибрационных испытаний систем управления и их элементов // Надежн. систем и средств управл. 4.1-. Л.: 1975. С. 152-154.
170. Луковников В.И. Рабочие характеристики обобщенного колебательного электродвигателя // Электричество. 1979. N5. С.19-24.
171. Луковников В.П., Середа В.П. Динамические режимы работы асинхронного электропривода. М.: Изд-во ВЗПИ. 1990.- 211с.
172. Луковников В.И., Середа Л.С. Основы гиперкомплексного метода расчета электрических цепей // Задачи динамики электрических машин. Омск. 1986. С. 35-38.
173. Луковников В.И. Электропривод колебательного движения. М.: Энергоатомиздат. 1984.- 152с.
174. Луковников В.И. Электромашинный безредукторный колебательный электропривод // Электротехническая промышленность. Электропривод. 1980. N8 (88). С. 14-18.
175. Луковников В.И. и др. Исследование электромеханических переходных процессов в асинхронных двигателях со специальным движением вала // Изв. вузов. Электромеханика. 1977. N12. С. 1342-1345.
176. Луковников В.И., Варламов В.И. Линейный асинхронный двигатель в режиме вибрационного силовозбуждения // Электротехника. 1978. N 8. С. 21-24.
177. Луковников В.И. Основы бикомплексного исчисления и его применение к" расчету электромеханических систем с модуляцией // Электричество. 1978. N 2. С.26-31.
178. Луковников В.И., Зиновьев Г.Г., Аристов A.B. Точность управления асинхронными электродвигателями колебательного движения // Электричество. 1984. N7. С. 72-76.
179. Маевский O.A. Энергетические показатели вентильных преобразователей. М.: Энергия. 1978. 320 с.
180. Малиновский А.Е. Талюко В.В. Дифференциальные уравнения несимметричного асинхронного двигателя, не содержащие периодических коэффициентов // Электричество. 1981. N 7. С. 64-66.
181. Малиновский А.Е. Математическое моделирование на АВМ асинхронных двигателей с одновременной несимметрией статорной и роторной цепей//Изв. ВУЗов. Энергия. 1981. N3. С.16-20.
182. Малофиенко С.Г. Разработка и исследование колебательных электроприводов с периодическим законом движения вала (штока): Автореф. дис. канд. техн. наук. Томск. ТПИ. 1982.
183. Мамедов Ф.А., Беспалов В.Я., Резниченко В.Ю., Малиновский А.Е. Формирование синусоидального режима в АД // Динамические режимы работы электрических машин переменного тока. Смоленск. СФМЭИ. 1975. С. 4850.
184. Матвеев В.А. и др. Вибрационный стенд с плавным регулированием амплитуды колебаний на ходу // Оптико-механическая промышленность. 1959. N 2. С. 42-48.
185. Мейстель A.M. Динамическое торможение приводов с асинхронными двигателями. Электроприводы с полупроводниковым управлением/ Под ред. М.Г. Чиликина // Библ. по автотехнике. N222. M-J1.: Энергия. 1967. -123 с.
186. Мелкозеров П.С. Энергетический расчет систем автоматического управления и следящих приводов. М.: Энергия. 1968. 304 с.
187. Менчиков В.М., Шумилин В.П. Образцовая установка для градуирования угловых акселерометров ОКМ-1 // Измерительная техника. 1974. N2. С. 1820.
188. Мирошниченко Г.Г. Вынужденные колебания электромагнитного одно-тактного вибропривода / В кн. Автоматизация технологических процессов. Вып. 2. Тула. 1974. С.191-197.
189. Молочко В.И. и др. Усройство для вибрационного точения к универсальному станку // Станки и инструмент. 1973. N4. С.33-34.
190. Монахов В.Н., Анахин В.Д. Сепарация на вибрирующей поверхности, совершающей бигармонические колебания // Изв. вузов Машиностроение. 1974. N 10. С. 115-117.
191. Муханов H.A., Першин Ю.С., Цветков JI.A. Регулируемый асинхронный привод сновальной машины // Пром. энергетика. 1974. N 6. С.30-31.
192. Новик Я.А. Алгоритм построения уравнений для численного расчета магнитного поля методом конечных элементов // Сборник алгоритмов и программ. Рига: РПИ. 1974. Вып. 4. С.20-24.
193. Новик Я.А. Решение систем нелинейных уравнений методом Ньютона в численных расчетах магнитного поля методом конечных элементов // Сборник алгоритмов и программ. Рига: РПИ. 1974. Вып. 4. С.28-34.
194. Онищенко Г.Б., Локтева И.Л. Метод колеблющихся координат в исследовании электромагнитных переходных процессов асинхронных электроприводов / В кн.: Автоматизация электроприводов в промышленности. М.: Энергия. 1974. С. 68-71.
195. Онучин Ю.А. Уравнения переходных процессов машины двойного питания // Параметры и системы возбуждения машин переменного тока. Тр. УПИ. Свердловск. Вып. 181. 1970. С. 48-55.
196. Онучин Н.Б., Бондаренко А.П. Разработка и исследование цилиндрического линейного асинхронного двигателя // Изв. вузов. Горный журнал. 1973. N7. С. 132-139.
197. Парнес М.Г. Расчет и конструирование намоточных станков. М.: Машиностроение. 1975. 296с.
198. Пат. 2028026 (RU). Колебательный электропривод / АристовА.В., Тимофеев A.A., Шумар C.B.//Б.И. 1995. N3.
199. Певзнер Я.М., Горелик A.M. Пневматические и гидравлические подвески. М.: Машгиз. 1963.-319 с.
200. Пестерев K.JI. Исследование путей улучшения помехозащищенности оп-тикоэлектронных мазаичных датчиков положения: Автореф. дисс. канд. техн. наук. Томск. ТПИ. 1975.
201. Петелин Д.П., Швальбойм И.С. Регулирование фазы нагрузки синхронного электропривода машин возвратно-поступательного движения //Изв. вузов. Электротехника. 1974. N 2. С.33-36.
202. Петров Б.И. Предельная амплитуда колебаний выходного вала следящего привода//Изв. вузов. Электромеханика. 1968. N10. С. 1118-1121.
203. Петров И.И., Мейстель A.M. Специальные режимы работы асинхронного электропривода. М.: Энергия. 1968. 264 с.
204. Петров Б.И., Полковников В.А. Динамические возможности следящих электроприводов. М.: Энергия. 1976. 128 с.
205. Повидайло В.А. и др. Вибрационные устройства в машиностроении. М.: Машгиз. 1962. 111 с.
206. Постников И.М. Обобщенная теория и переходные процессы электрических машин. М.: Высшая школа. 1975. 319с.
207. Потемкин Б.А., Синев A.B. Синтез систем виброзащиты с учетом динамических свойств объекта и основания.// Изв. АН. СССР. Механика твердого тела. 1975. N2. С. 50-57.
208. Потураев В.Н., Франчук В.П., Червоненко А.Г. Вибрационные транспортирующие машины. М.: Машиностроение. 1964. 272 с.
209. Приборы и системы для измерения вибрации, шума и удара: Справочник. В 2-х кн. Кн. 2 / Под ред. В.В. Клюева. М.: Машиностроение. 1978. 439с.
210. Пуусепп Е.А., Томсон Я.Я. Линейный реверсивный двигатель // Тр. Таллинского политехнического института. 1979. N382. С. 29-47.
211. Пухов Г.Е. Комплексное исчисление и его применение к расчету периодических и переходных процессов в системах с постоянными, переменными нелинейными параметрами. Таганрог. 1956. 283 с.
212. Пухов Г.Е. Теория мощности системы периодических многофазных токов//Электричество. 1953. N 2. С. 56-61.
213. Разработка и исследование линейного колебательного электропривода с асимметричным законом движения: Отчет о НИР / Отв. исп. Аристов A.B. N гос. регист. 0186. 0132096. М.: 1986. 51 с.
214. Разработка и исследование линейного колебательного электропривода с асимметричным законом движения: Отчет о НИР / Отв. исп. Аристов A.B. N гос. регист. 0288. 0035991. М.: 1987. 122 с.
215. Разработка и исследование линейного колебательного электропривода активного компенсатора: Отчет о НИР / Отв. исп. Аристов A.B. N гос. регист. 087. 0062504. М.: 1988 50 с.
216. Разработка и исследование линейного колебательного электропривода. Создание тракта для виброакустических исследований АЧХ: Отчет о НИР / Отв. исп. Аристов A.B. N гос. регист. 75-80-42/05. Томск. 1988. 41 с.
217. Ривин Е.И. Применение асинхронных тахогенераторов для измерения крутильных колебаний // Тр. ВНИИмаша. 1974. Вып. 7. С. 75-80.
218. Романов A.A. Литье стали в вибрирующие формы. М.: Машгиз. 1959.-63 с.
219. Роубичек О. Система регулируемого линейного низкочастотного колебательного электропривода// Электричество. 1974. N10. С.86-88.
220. Рыбников С.И. Автоматическое управление намоткой. М.: Энергия. 1972. 172 с.
221. Рюденберг Р. Переходные процессы в электроэнергетических системах. М.: 1955. 715 с.
222. Ряшенцев Н.П., Тимошенко Е.М., Фролов A.B. Теория, расчет и конструирование электрических машин ударного действия. Новосибирск: Наука. 1970.- 259 с.
223. Сарапулов Ф.Н., Сокуров Б.А., Прудников Ю.С. и др. Электромагнитное воздействие на металлы // Вестник Уральского госуд. техн. университета. 1995. С. 264-269.
224. Свечарник Д.В. Линейный электропривод. М.: Энергия. 1979. 153 с.
225. Свечарник Д.В. Электромеханические преобразователи видов движения // Электричество. 1988. N 6. С.27-28.
226. Свириденко С.Х. и др. Элементы автоматизации металлорежущих станков. М.: Машиностроение. 1964. 212 с.
227. Скоробогатов В.И. Магнитострикционный вибратор как электрическая машина возвратно-поступательного движения // Сб. Тр. Моск. ин-та инж. ж.д. транспорта. 1974. Вып. 468. С. 40-56.
228. Соколов М.М., Масандилов Л.Б. Измерение динамических моментов в электроприводах переменного тока. М.: Энергия. 1975. -184 с.
229. Соколов М.М., Сорокин Л.К. Электропривод с линейными асинхронными двигателями. М.: Энергия. 1974. 136 с.
230. Соколов М.М., Сорокин Л.К. Применение асинхронных двигателей прямолинейного движения для привода прокладчика уточной нити ткацкого станка // В кн. Автоматизированный электропривод в народном хозяйстве. Т.4. М.: Энергия. 1971. С. 252-254.
231. Справочник радиолюбителя. Массовая радиобиблиотека. Вып. 394 / ред. совет. A.A. Куликовский (пред.) М.: Госэнергоиздат. 1961.- 500с.
232. Титов B.C. Разработка и исследование оптико-электронного мозаичного датчика положения: Автореф. дисс. канд. техн. наук. Томск. ТПИ. 1974.
233. Ткалич С.А. Принципы построения систем управления колебательным электроприводом с повышенными энергетическими показателями // Исследование специальных электрических машин и машино-вентильных систем. Томск. ТПИ. 1987. С. 21-27.
234. Ткалич С.А. Разработка колебательного электропривода с повышенными энергетическими показателями: Автореф. дис. канд. техн. наук. Томск. ТПИ. 1988.
235. Ткалич С.А., Аристов A.B. Сравнительный анализ колебательных электроприводов переменного тока // Электромашинные и машино-вентильные источники импульсной мощности. Тез. докл. НТК. Томск. ТПИ. 1987. С. 6061.
236. Тодарев В.В. Энергетические характеристики асинхронного электродвигателя колебательного движения в составе электрогидропривода. Автореф. дис. канд. техн. наук. Минск. Белорусский ПИ. 1990.
237. Трещев И.И. Электромеханические процессы в машинах переменного тока. JL: Энергия. 1986. 344с.
238. Трещев И.И. Методы исследования электромагнитных процессов в машинах переменного тока. JL: Энергия. 1969. 235с.
239. Федотов В.М. Асинхронный колебательный электропривод с регулируемой собственной частотой: Автореф. дис. канд. техн. наук. Томск. ТПИ. 1982.
240. Фильц Р.В. Исследование машин переменного тока с насыщенной главной магнитной цепью: Автореф. дис. канд. техн. наук. Львов. ЛПИ. 1966.
241. Фильц Р.В.,Глуховский Л.И. Основные положения магнито-нелинейной теории явнополюсных синхронных машин // Электричество. N 6. 1970. С. 30-34.
242. Форсайт Дж. и др. Машинные методы математических вычислений. М.: Мир. 1980.-279 с.
243. Фролов К.В. Уменьшение амплитуды колебаний резонансных систем путем управляемого изменения параметров // Машиностроение. 1965. N 3. С. 38-42.
244. Фурунжиев Р.И. Управление колебаниями многоопорных машин. М.: Машиностроение. 1984. 206 с.
245. Хархута Н.Я. Машины для уплотнения грунтов. Теория, расчет и конструкции. JL: Машиностроение. 1973. 175 с.
246. Чабан В.И. Исследование переходных процессов неявнополюсных машин переменного тока с учетом насыщения главной магнитной оси: Автореф. дис. канд. техн. наук. Львов. ЛПИ. 1970.
247. Чечет Ю.С. Электрические микромашины автоматических устройств. М.-Л.: Энергия. 1964. 424 с.
248. Чиликин М.Г., Ключев В.И., Сандлер A.C. Теория автоматизированного электропривода / Учебное пособие для вузов. М.: Энергия. 1979. 616с.
249. Шакарян Ю.Г. Асинхронизированные синхронные машины. М.: Энерго-атомиздат. 1984. 192 с.
250. Шаповаленко А.Г., Гаврилюк В.А. Линейные асинхронные двигатели и их особенности. // Киев. Вестник КИИ сер. Электроэнергетика. 1980. Вып. 17. С. 72-74.
251. Шахова Н.В. Кручение и перемотка химических нитей. М.: Высшая школа. 1975. 240 с.
252. Шнейдер Ю.Г. Вибрационное обкатывание (результаты, перспективы внедрения). Л. ЛДНТП. 1974. 198 с.
253. Шубравый И.И. Моделирование автоколебательной самонастраивающейся системы следящего привода // Сб. науч. труд. Всесоюзного заочного инта машиностроения. 1973. Вып. 1. С.48-64.
254. Шукялис А. Применение электрических машин поступательного движения в вибрационных устройствах // Науч. труды вузов Литовской ССР. Вибротехника. 1973. Вып.3(20). С. 42-46.
255. Шутов Е.А. Динамические процессы индукционной машины двойного питания в режиме вынужденных колебаний: Автореф. дис. канд. техн. наук. Томск. ТПН. 1982.
256. Шутов Е.А., Аристов A.B. Комбинированный метод расчета колебательного режима работы машины двойного питания // Рук. деп. в ВИНИТИ 19.11.91. N4335 -В 91.- 13 с.
257. Шурыгин Ю.А., Дмитриев В.М. и др. Система автоматизации моделирования управляемого электропривода. Томск: Изд-во Том. ун-та, 1979, -91 с.
258. Эллер Э.А. Двигатель двойного питания с последовательным соединением обмоток статора и ротора // Тр. ЛИИ. 1936. N 5. С. 272-305.
259. Юферов Ф.М. Электрические машины автоматических устройств. М.: Высшая школа. 1976. 416 с.
260. Юшманов Ю.И. Исследование режимов работы МДП при частоте 50 Гц: Автореф. дис. канд. техн. наук. Свердловск. УПИ. 1960.
261. Якубайтис Э.А. Синтез асинхронных конечных автоматов. Рига. Зинат-не. 1970. 326 с.
262. Andressen Е. Linearer Kurzlaufer Induktionst - motor mit stellbaren Sekundarteil und diskretiwierlicher Standeranordnung. "ETZ". 1975. 195. N2.
263. Carter G.W. The electromagnetic fields in its engineering aspect. Longmans. London. 1954.
264. Crisan A., Yiorel A. Consideratii asupra ecuatiilor masinilor de curent alternativ dublu alimentate, in regim stationar. "Sesiun. stiint. a cadr. didact. Cjmunic., 1973.463-468.
265. Dirr R., Neuffer J., Schlüter W., Waldmann H. Neuartige electronische Regeleinrichtungen fur doppeltgespeiste Asynchronmotoren groser Leistung / Siemens-Z. 1971. 45. N 5. S. 362-367.
266. Elektronische Sanftanlaufsteuerungen // Techn. Rept., 1991. 18. N5 A. S. 104.
267. Fork R., Rogenhafen I. Erprobung eines mathematischen Turbogeneratormodels: ETZ-A, Bd. 88(1967). 317.
268. Grob H. Eine neue Motorschaltung."ETZ". 1901. N10. S.211.
269. Hanemann S. Schwingförderer in automatischer Werwiegeanlage / Techn. Mitt. AEG Tele funken. 1973. 63. N 2. 67-68.
270. Intelligent AC drive what is it and how it works. "Autom. and Contr.", 1988. 20. N1. 19-21.
271. Jordan Tl. Erzwungene Schwingungen von Asynchronmaschinen. Elektrotechnische Zeitung. 1963. Bd A84. N20. 15-20.
272. Kloss M., Steudel H. Der Drehstrom doppelfeldmotor fur doppelsynchrone Drehzahl / "ETZ". 1935. FI. 32. S. 885-889.
273. Ledwich G. Transient loss minization for induction motora with variable speed drive. "1. Elec. and Electron. Eng. Austral.", 1987. 7. N3. 190-195.
274. Lenk A., Rehnitz J. Schwingungspruftechnic. Berlin. 1974. -270 s.
275. Moon P., Spenser D. Field theory for engineer. Yan Nostraund, New-York, 1961.
276. Park R. Definition of an ideal synchronous machine and formuly the theory of synchronous machine-generalized method of analysis. "AIEE Tränst." Parti. 1929; Part II. 1933. ■
277. Pat. 3343012 (USA). Oscillmg motor / E.E. Scott.
278. Pat. 883837 (England). Linear induction motor / E. Lauithwaite.
279. Poloujadoff M. Graphical representation of doubly fed induction machine operation // Elec. Mach, and Power Syst. 1988.-15. N 2. S. 93-108.
280. Przybylski J., Koczara W. Application of the asynchronous brushless motor in the cascade drive system // Int. Conf. Eval. and Mod. Aspects Induct. Mach, Turm, July 8-11, 1986. Proc. "Borge San Dalmazzo, Suneo. 1986. 637-640.
281. Radovanovic G. Motori dvojnog napajanja / Elektrotehnika 33 (1984) 7-8. 971-973.
282. Roubicek Ota, Pejsek Zdenek, Pozprim Jan. Elektronicka struktura kmitaveho synchronniho linearniho pohonu / Elektrotechn. obz., 1988. 77. N 6. 355-360.
283. Santes Boschlounigen von Drohstrommotoren // VDI Zeitschrift, 1991, 333, Spec. Aucg. 3 S.66.
284. Shock and Vibration Handbook. By C.M. Harrisand erede. New York, San Francisco, Toronto, London, Sidney, MeGraw. Hill Book Company. 1961.
285. Sobczyk T.J. On the stability problem of linear systems with periodic coefficients. / Proc. Int. Conf. Elec. Mach., Budapest, 5-9 Sept., 1982. c.a. 7779.
286. Späth H., Pacas J.M. Neues Steuerverfahren fur die doppeltgrspeiste Drehstrommaschine in Serienschaltung / "ETZ" Archi B. 5. N 10. 1983.
287. Starthilfe fur Asynchronmotoren // Masch. Anlag. Verfahr. 1991. N 4. S. 39.
288. Trombetta P. The electric hommer. "I. American Inst. Electric Eng.". 1922. Vol. 41. N4. 83-88.
Обратите внимание, представленные выше научные тексты размещены для ознакомления и получены посредством распознавания оригинальных текстов диссертаций (OCR). В связи с чем, в них могут содержаться ошибки, связанные с несовершенством алгоритмов распознавания. В PDF файлах диссертаций и авторефератов, которые мы доставляем, подобных ошибок нет.
В отличие от схем вентильного каскада, где поток энергии скольжения направлен только в одну сторону - от ротора двигателя к инвертору и далее в питающую сеть, в схемах двигателя двойного питания в цепь ротора включают преобразователь (рис. 6.38), обеспечивающий двухсторонний обмен энергией, как от ротора двигателя в питающую сеть, так и от сети в обмотки ротора асинхронного двигателя. Таким преобразователем является преобразователь частоты с непосредственной связью. При этом добавочная ЭДС, вводимая в цепь ротора, может быть направлена, как против ЭДС ротора, согласно с ней или под некоторым углом (л - 8). В общем случае
TJ = ТТ ж)
°доб ^доб^
Рис. 6.38.
UFA, UFB, UFC - преобразователи частоты с непрерывной связью
Ток ротора определяют из уравнения равновесия напряжений в контуре ротора:

где z 2 - комплексное сопротивление цепи ротора.
Активная и реактивная составляющие тока ротора равны:

В этих формулах: Е у Е 2н - текущая и номинальная (при 5=1) ЭДС ротора;
Активная составляющая тока ротора определяет момент двигателя Ми механическую мощность двигателя: мех = со (1-5).
Реактивная составляющая тока ротора определяет реактивную мощность, циркулирующую в статорной и роторной цепях двигателя:
Равенства (6.67) показывают, что, регулируя значения и фазу добавочного напряжения доб, вводимого в цепь ротора, можно управлять активной и реактивной мощностями двигателя. Из этого положения также следует, что при соответствующих значениях U 2 и 8 активная составляющая тока ротора может быть отрицательна при положительных скольжениях 5 > 0 и положительна при отрицательных скольжениях 5
Мощность торможения Р в рассматриваемом случае недостаточна для создания электромагнитной мощности Р, поэтому из сети через трансформатор и роторный преобразователь забирается и направляется в ротор двигателя недостающая мощность, пропорциональная скольжению s = со 0 5. Сумма механической мощности,
поступающей с вала, и мощности скольжения + = со =
образует электромагнитную мощность, которая рекуперируется в питающую сеть. Отдаваемая в сеть мощность равна разности рекуперируемой мощности, передаваемой по цепи статора, и мощности, забираемой со стороны трансформатора: = -
В двигательном режиме при скорости выше синхронной (рис. 6.39,5) в роторную цепь двигателя добавляется мощность скольжения, забираемая из сети со стороны трансформатора. Она складывается с электромагнитной мощностью, поступающей в двигатель со стороны статора. Сумма этих мощностей преобразуется в механическую мощность на валу двигателя, обеспечивая работу двигателя с моментом М при скорости выше синхронной:

Рис. 6.39. а - режим генераторного торможения при скорости ниже синхронной; б- двигательный режим при скорости выше синхронной
Заметим, что, несмотря на то, что скольжение в этом случае отрицательно, двигатель развивает двигательный момент.
В обоих рассматриваемых режимах преобразователь частоты работает таким образом, что энергия от трансформатора поступает в ротор двигателя, т.е. двигатель питается как со стороны статора, так и ротора.
Поскольку частота/ 2 ЭДС и тока ротора определяется скольжением двигателя / 2 = / , то и частота добавочной ЭДС, вводимой в цепь ротора, должна совпадать с частотой ЭДС ротора и изменяться при изменении скольжения двигателя.
Максимально возможный диапазон регулирования скорости вниз и вверх от синхронной определяется двумя параметрами - возможными максимальными значениями частоты/ 2 и напряжения ^ добтах на выходе преобразователя частоты, служащего для питания цепи ротора. Максимальный диапазон регулирования скорости будет равен = co max /co m =(+ max)/(- max).
Абсолютное значение максимального скольжения равно
| шах | ^доО / 2н "
Так как преобразователь частоты с непосредственной связью, как правило, обеспечивает регулирование частоты в пределах 20 Гц (при частоте питания 50 Гц), чему соответствует максимальное скольже- ние | 0тах | = 0, то максимальный диапазон регулирования скорости двигателя двойного питания равен: = , со 0 /0, со 0 ~ 2, : .
Регулирование скорости в схеме двигателя двойного питания производят изменяя относительное значение и знак добавочной ЭДС 8 = ?/ доб / 2н, при этом частота на выходе преобразователя автоматически поддерживается равной частоте тока ротора. Механические характеристики двигателя двойного питания при 8 = 0,2 приведены на рис. 6.40.

Основным достоинством схем вентильного каскада и двигателей двойного питания является высокий КПД, сохраняющийся при регулировании скорости в заданном диапазоне. Поскольку эти системы регулируемого асинхронного привода имеют ограниченный диапазон регулирования, как правило, не выше 2:1, то эти системы применяют, главным образом, для привода мощных (выше 250 кВт) турбомеханизмов: вентиляторов, центробежных насосов и др.
По конструкции машина двойного питания (асинхронизированная синхронная машина, управляемая машина переменного тока) подобна асинхронной машине с фазным ротором, На ее статоре, как правило, размещается трехфазная обмотка, а на роторе двухфазная или трехфазная.
Обмотка статора получает питание от сети с частотой питающего напряжения f 1 , а к обмотке ротора через управляемый вентильный преобразователь ПЧ подводится напряжение с частотой f 2 (f 2 < f 1 ) . Частота и амплитуда напряжения ПЧ регулируются по заданному закону системой управления. Машины двойного питания целесообразно применять в установках большой мощности, где их преимущества наиболее сильно проявляются. Они могут работать в качестве генераторов и двигателей как в синхронном, так и в асинхронном режиме.
В машине двойного питания, работающей двигателем, изменением f 2 можно регулировать частоту вращения. Частота тока в роторе асинхронной машины
f 2 = f 1 s , (1)
s = ( n 1 - n ) / n 1 (2)
n 1 - частота вращения магнитного поля.
Решая совместно (1) и (2), получаем зависимость
частоты вращения ротора n от f 1 и f 2 :
n = n1( f 1 ± f 2 ) / f 1 . (3)
Знак плюс соответствует чередованию фаз ПЧ , при котором ротор и его магнитное поле вращаются в противоположных направлениях, а минус - когда они вращаются в одну и ту же сторону.
Из (3) следует, что в зависимости от направления вращения магнитного поля ротора можно получить n < n 1 , или n > n 1 , Если при работе поддерживать f 2 = const , то машина будет работать в синхроyном режиме, а при f 2 = var - в асинхронном. Когда f 2 = 0 (питание обмотки ротора постоянным током), то машина работает как обычный синхронный двигатель.
С целью снижения активной мощности преобразователя частоты, которая равна Р п.ч = ( f 2 / f 1 ) Р ЭМ (здесь Р ЭМ - электромагнитная мощность), частоту f 2 изменяют в небольших пределах. Кроме частоты вращения в машине двойного питания, работающей двигателем, можно регулировать реактивную мощность и cos φ . Машина может работать как с опережающим, так и с отстающим током. Если подводимая к обмотке ротора добавочная ЭДС Е Д совпадает по направлению с индуктированной в ней ЭДС Е 2 , то В этом случае происходит регулирование частоты вращения ротора. При изменении фазы Е Д относительно Е 2 одновременно с регулированием частоты вращения изменяется и реактивная мощность, т. е. cos φ .
Машины двойного питания, работающие в энергосистемах как генераторы, имеют определенные преимущества по сравнению с обычными синхронными генераторами: они более устойчиво работают в режимах глубокого потребления реактивной мощности, имеют большую динамическую устойчивость, обеспечивают компенсацию колебания частоты и т. д.
 Машины двойного питания можно использовать в качестве электромеханического преобразователя частоты для гибкой связи энергосистем, частоты которых несколько отличаются друг от друга (не более 0,5 - 1%). Электромеханический преобразователь частоты для гибкой связи энергосистем состоит из двух машин, соединенных общим валом (см. рис.). Одна из этих машин является обычной синхронной машиной СМ
, а другая - машиной двойного питания МДП
. Статорные обмотки машин подключены к разным энергосистемам. Система управления вырабатывает такой сигнал, чтобы частота напряжения в роторе машины двойного питания равнялась разности частот связываемых энергосистем. Одна из машин работает как двигатель, а другая - как генератор. При этом мощность из одной энергосистемы передается в другую.
Машины двойного питания можно использовать в качестве электромеханического преобразователя частоты для гибкой связи энергосистем, частоты которых несколько отличаются друг от друга (не более 0,5 - 1%). Электромеханический преобразователь частоты для гибкой связи энергосистем состоит из двух машин, соединенных общим валом (см. рис.). Одна из этих машин является обычной синхронной машиной СМ
, а другая - машиной двойного питания МДП
. Статорные обмотки машин подключены к разным энергосистемам. Система управления вырабатывает такой сигнал, чтобы частота напряжения в роторе машины двойного питания равнялась разности частот связываемых энергосистем. Одна из машин работает как двигатель, а другая - как генератор. При этом мощность из одной энергосистемы передается в другую.
Машина двойного питания может применяться как источник напряжения постоянной частоты при переменной частоте вращения ротора.
Выразим в (3) n 1 , через f 1 (из формулы n 1 = 60f 1 / p ).
После преобраэования получим
f 1 = рn / 60 ± f 2 (4)
Из (4) следует: чтобы при переменной частоте вращения ротора n получить f 1 =const , необходимо соответственно изменить частоту f 2 подводимого r ротору напряжения.
Машины двойного питания пока еще не получили широкого применения. Они изготовляются в единичном исполнении.